Obrtni moment asinhronog motora. Derivacija formule. Nominalni, kritični i startni momenti
Akcija magnetsko polje po okretu sa strujom vam omogućava da ga koristite za određivanje modul magnetne indukcije. Rotacija zavojnice u magnetskom polju pokazuje da na njega djeluju najmanje dvije sile. Rezultante ovih sila će se primijeniti na tačke A i B (slika 6.8). Obrtni moment, koji djeluje na okret, bit će jednak proizvodu jedne od ovih sila F̅ po radijusu okretanja r. Ovaj trenutak se ne mora računati. Može se izmjeriti pomoću spiralne opruge ili drugog uređaja za mjerenje momenta spojenog na zavojnicu.
Eksperimenti pokazuju da se kalem sa strujom u magnetskom polju uvijek okreće tako da je smjer njegova normala n̅ poklapa se sa smjerom magnetske indukcije polja koje se proučava B̅. Očigledno je da će u ovom slučaju obrtni moment biti nula. Imat će maksimalnu vrijednost kada je ugao između magnetne indukcije B̅ i normalno n̅ biće jednak 90°.
Magnetna indukcija se može odrediti djelovanjem sile magnetskog polja na vi-struju sa strujom.
Bez promjene jačine struje u vodiču, ispitujemo kako vrijednost ovisi maksimalni obrtni moment na parametre zavojnice.
Postavljajući zavojnicu na određenoj udaljenosti od vodiča koji vodi struju, mjerimo maksimalni moment Mmax za određenu trenutnu vrijednost u zavoju I 1. Udvostručimo struju u zavoju. At I 2 = 2I 1 maksimalni mehanički moment će biti jednak M max 2 = 2M max 1. Isto ćemo primijetiti kada se struja poveća za 3, 4, 5 puta. dakle, maksimalna vrijednost obrtnog momenta, koji djeluje na kalem sa strujom, bit će proporcionalno struji u zavoju
M max ~I vit.
Obrtni moment , koji djeluje na okret u magnetskom polju, proporcionalan je jačini struje u njemu.Materijal sa sajta
Ako ovu zavojnicu zamijenite drugom, sa većom ili manjom površinom S vit, tada ćemo primijetiti odgovarajuće povećanje ili smanjenje vrijednosti maksimalnog momenta. dakle,
maksimalni obrtni moment , koji djeluje na okret u magnetskom polju, proporcionalan je njegovoj površini:
M max ~S vit.
Kombinujući rezultate obe faze studije, dobijamo
M max ~I vit.S vit.
Na ovoj stranici nalazi se materijal o sljedećim temama:
Napon U 1 primijenjen na fazu namota statora uravnotežen je glavnom emf E 1 , emf curenja i padom napona na aktivnom otporu namota statora:
U namotu rotora, slična jednačina će izgledati ovako:
Ali pošto je namotaj rotora zatvoren, napon U 2 =0, a ako uzmemo u obzir i da je E 2s = SE 2 i x 2s = Sx 2, onda se jednačina može prepisati kao:
![]()
Trenutna jednačina za asinhroni motor ponavlja sličnu jednačinu za transformator:
28 Obrtni moment asinhronog motora
Obrtni moment u asinhronom motoru nastaje interakcijom struje rotora sa magnetnim poljem mašine. Moment se matematički može izraziti u smislu elektromagnetne snage mašine:
Gdje w 1 =2pn 1 /60 - ugaona frekvencija rotacije polja. sa svoje strane, n 1 =f 1 60/R, Onda
![]()
Zamenimo formulu M 1 izraz REm=Pe2/S i podijelimo sa 9,81, dobijemo:
![]()
Jednačina momenta indukcionog motora
Iz toga slijedi da je moment motora proporcionalan električnim gubicima u rotoru. Zamijenimo trenutnu vrijednost u posljednju formulu I 2 ’ :
dobijamo jednačinu za moment asinhronog motora:
Gdje U 1 - fazni napon namotaja statora.
29 .Mehaničke karakteristike motora naziva se zavisnost brzine rotora od momenta na osovini n = f (M2). Pošto je pod opterećenjem obrtni moment praznog hoda mali, tada je M2 ≈ M i mehaničke karakteristike je predstavljen zavisnošću n = f (M). Ako uzmemo u obzir odnos s = (n1 - n) / n1, tada se mehanička karakteristika može dobiti prikazom njene grafičke zavisnosti u koordinatama n i M (slika 1).

Rice. 1. Mehaničke karakteristike asinhroni motor
Prirodne mehaničke karakteristike indukcionog motora odgovara glavnom (sertifikatnom) kolu njegovog priključka i nazivnim parametrima napona napajanja. Veštačke karakteristike dobijaju se ako su uključeni neki dodatni elementi: otpornici, prigušnici, kondenzatori. Kada se motor napaja nenaglašenim naponom, karakteristike se također razlikuju od prirodnih mehaničkih karakteristika.
Mehaničke karakteristike su vrlo zgodne i koristan alat pri analizi statičkih i dinamički načini rada električni pogon.
30 Mehaničke karakteristike i samoregulacija motora. Grafikon koji povezuje mehaničke veličine - brzinu i moment - naziva se mehanička karakteristika asinhronog motora (slika 7) n = ƒ(M). Samoregulacija asinhronog motora je sljedeća. Neka motor radi stabilno u nekom režimu, razvijajući brzinu n1 i obrtni moment M1. Uz ravnomjernu rotaciju, ovaj moment jednak je momentu kočenja M t1, tj. M1=M T 1, n1= konset. Povećanje momenta kočenja na M2 će uzrokovati smanjenje brzine stroja, budući da će kočni moment postati veći od momenta. Kako se brzina smanjuje, klizanje se povećava, što zauzvrat uzrokuje povećanje emf i struje u rotoru. Ovo povećava obrtni moment motora. Ovaj proces se završava kada obrtni moment M2 koji razvija motor postane jednak M T 2. U ovom slučaju, brzina rotacije je podešena niža od n1. Svojstvo automatskog uspostavljanja ravnoteže između kočenja i obrtnog momenta se naziva samoregulacija.
Na laboratorijskom stolu motor je opterećen električnom kočnicom, koja se sastoji od elektromagneta, u čijem se procjepu okreće disk postavljen na osovinu motora. Promjenom napona koji napaja zavojnicu elektromagneta sa ručkom autotransformatora, možete promijeniti silu kočenja, čiji je moment jednak: M KOČNICA = F r (N m)
gdje je F sila (sila) koja djeluje na obim remenice, (N);
r je polumjer remenice, jednak 0,18 m. Neto snaga na osovini motora:
Gdje n- brzina vrtnje motora, o/min.
gdje je ƒ frekvencija mreže (jednaka 50 Hz),
R- broj parova polova namotaja statora (jednako 2).
n 1 - sinhrona brzina rotirajućeg magnetnog polja.
Brzina rotacije motora se određuje pomoću tahometra. Klizanje se izračunava pomoću formule:
31 Karakteristike performansi pozvao zavisnosti od moći, koju troši motor, potrošnja struje I, faktor snage, brzina rotacije motora, efikasnost i obrtni moment M od korisne snage motora dostavljene na osovinu. Karakteristike performansi određuju osnovna radna svojstva asinhronog motora. Karakteristike performansi asinhronog motora srednje snage prikazano na sl. 8.8. Njihovo ponašanje je objašnjeno na sljedeći način. Pri malim opterećenjima, struja koju troši motor I (struja bez opterećenja) može se kretati od 20 do 70% nazivne struje. Kako se opterećenje povećava, struja u krugu rotora raste, što dovodi do gotovo proporcionalnog povećanja struje I u strujnom kolu statora.

Slika 8.8 Obrtni moment motora () također je gotovo proporcionalan opterećenju, ali pri velikim opterećenjima linearnost grafikona je donekle poremećena zbog smanjenja brzine vrtnje motora. Karakteristika performansi izražava odnos između snage koju razvija motor i faznog pomaka između struje i napona statora. Asinhroni motor, poput transformatora, troši struju I iz mreže, koja je značajno van faze sa primijenjenim naponom. Na primjer, u stanju mirovanja. Kako raste opterećenje na osovini motora, aktivne komponente rotora i statora rastu, povećavajući se . Maksimalna vrijednost je dostignuta na .
Daljnjim povećanjem vrijednost će se lagano smanjiti. To se objašnjava povećanjem klizanja s, što uzrokuje povećanje reaktanse namota rotora, a samim tim i fazni pomak . WITH povećava i, tj. će se smanjiti.
Ponašanje karakteristike performansi objašnjava se na sljedeći način. Vrijednost efikasnosti određena je omjerom korisna snaga na snagu potrošenu iz mreže.
Količina se zove gubitak snage. Pored gubitaka u čeliku statora i rotora zbog preokretanja magnetizacije i vrtložnih struja, koji se zajedno sa mehaničkim gubicima mogu smatrati konstantnim, kod asinhronog motora postoje gubici u bakru. ,
one. u namotajima statora i rotora, koji su proporcionalni kvadratu struje koja teče i stoga ovise o opterećenju. Za vrijeme rada bez opterećenja, kao kod transformatora, dominiraju gubici u čeliku, jer je a jednako struji praznog hoda, koja je mala. Pri malim opterećenjima na osovini, gubici u bakru i dalje ostaju mali, a samim tim i efikasnost, određena formulom ![]() (8.5)
(8.5)
sa povećanjem, prvo naglo raste. Kada konstantni gubici postanu jednaki gubicima zavisnim od opterećenja , efikasnost dostiže svoju maksimalnu vrijednost. Sa daljim povećanjem opterećenja, promenljivi gubici snage se značajno povećavaju, što rezultira efikasnošću. primjetno opada. Priroda zavisnosti ) može se objasniti iz relacije . Ako je efikasnost bio konstantan, a onda između i biće linearna zavisnost. Ali pošto efikasnost zavisi od i ova zavisnost u početku naglo raste, a sa daljim povećanjem opterećenja neznatno se menja, onda kriva ) U početku polako raste, a zatim naglo raste.
32 Na bilo koji električni krug zbir snaga svih izvora električne energije mora biti jednak zbiru snaga svih prijemnika i pomoćnih elemenata. Nakon što smo prethodno dobili izraze stepena, možemo ih upisati opšti pogled jednadžba ravnoteže snage za bilo koje električno kolo:
Σ E → I → + Σ U ← I → = Σ E ← I → + Σ U → I → + Σ I 2 r.
Jednačina (1.35) se može napisati kako za stvarne smjerove emf, napona i struja, tako i za slučaj kada su neki od njih proizvoljno odabrani pozitivnim smjerovima. U prvom slučaju, svi članovi u njemu će biti pozitivni i odgovarajući elementi kola će zapravo biti izvori ili prijemnici električne energije. Ako su neki pojmovi napisani uzimajući u obzir proizvoljno odabrane pozitivne smjerove, odgovarajući elementi se moraju smatrati pretpostavljenim izvorima i primaocima. Kao rezultat izračuna ili analize, neki od njih mogu biti negativni. To će značiti da su neki od navodnih izvora zapravo prijemnik, a neki od pretpostavljenih prijemnika zapravo izvor.
33 Pokretanje asinhronog motora je praćen prolaznim procesom stroja koji je povezan s prijelazom rotora iz stanja mirovanja u stanje ravnomjerne rotacije, u kojem obrtni moment motora uravnotežuje moment sila otpora na osovinu stroja. Prilikom pokretanja asinhronog motora dolazi do povećane potrošnje električne energije iz napojne mreže koja se troši ne samo na savladavanje kočionog momenta primijenjenog na osovinu i pokrivanje gubitaka u samom asinkronom motoru, već i na prenošenje određene kinetičke energije. na pokretne dijelove proizvodne jedinice. Stoga, prilikom pokretanja, asinhroni motor mora razviti povećani moment. Za asinhroni motor sa namotanog rotora početni startni moment koji odgovara klizanju sp = 1 zavisi od aktivnog otpora podesivih otpornika uvedenih u kolo rotora.
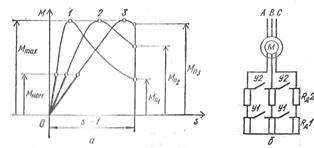
Rice. 1. Pokretanje trofaznog asinhronog motora sa namotanim rotorom: a - grafikoni zavisnosti momenta motora sa namotanim rotorom od klizanja pri različitim aktivnim otporima otpornika u kolu rotora, b - dijagram uključivanja otpornicima i zatvarajućim kontaktima za ubrzanje u krugu rotora. Dakle, sa zatvorenim kontaktima ubrzanja U1, U2, tj. pri pokretanju asinhronog motora sa kratkospojnim kliznim prstenovima, početni moment pokretanja Mn1 = (0,5 -1,0) Mnom, a početna startna struja Ip = (4,5 - 7) Inom i više. Nizak početni okretni moment asinhroni elektromotor s namotanim rotorom može biti nedovoljno za pogon proizvodne jedinice i njeno naknadno ubrzanje, a značajna startna struja će uzrokovati pojačano zagrijavanje namotaja motora, što ograničava učestalost njegovog uključivanja, a u mrežama male snage dovodi do privremenog pad napona koji je nepoželjan za rad drugih prijemnika. Ove okolnosti mogu biti razlog koji onemogućuje upotrebu asinhronih motora sa namotanim rotorom sa velikom startnom strujom za pogon pogonskih mehanizama. Uvođenje podesivih otpornika, nazvanih startni otpornici, u krug rotora motora ne samo da smanjuje početnu startnu struju, već istovremeno povećava početni moment pokretanja, koji može dostići maksimalni moment Mmax (slika 1, a, kriva 3 ), ako je kritično proklizavanje motora sa namotanim rotorom skr = (R2" + Rd") / (X1 + X2") = 1, gdje je Rd" aktivni otpor otpornika koji se nalazi u fazi rotora motora namotaj, sveden na fazu namotaja statora. Daljnje povećanje aktivnog otpora startnog otpornika je nepraktično, jer dovodi do slabljenja početnog startnog momenta i ulaska tačke maksimalnog momenta u klizno područje s > 1, što eliminiše mogućnost ubrzanja rotora. Neophodno aktivni otpor Otpornici za pokretanje motora sa namotanim rotorom određuju se na osnovu zahtjeva za pokretanje, što može biti lako kada je Mn = (0,1 - 0,4) Mn, normalno ako je Mn - (0,5 - 0,75) Mn, i ozbiljno kada je Mn ≥ Mn. Za održavanje dovoljno velikog obrtnog momenta pomoću motora sa namotanim rotorom tokom ubrzanja proizvodne jedinice kako bi se smanjilo trajanje proces tranzicije a za smanjenje zagrijavanja motora potrebno je postepeno smanjivati aktivni otpor startnih otpornika. Dozvoljena promjena momenta za vrijeme ubrzanja M(t) određena je električnim i mehaničkim uvjetima koji ograničavaju granicu vršnog momenta M > 0,85 Mmax, uklopni moment M2 > > Ms (slika 2), kao i ubrzanje.

Rice. 2. Početne karakteristike trofaznog asinhronog motora sa namotanim rotorom. Prebacivanje startnih otpornika osigurava se naizmjeničnim uključivanjem kontaktora ubrzanja Y1, Y2, odnosno u vremenima t1, t2 računajući od trenutka pokretanja motora, kada pri ubrzanju moment M postaje jednak uklopnom momentu M2. Zahvaljujući tome, tokom cijelog pokretanja, svi vršni momenti su isti i svi momenti uključivanja jednaki su jedni drugima. Budući da su moment i struja asinhronog motora sa namotanim rotorom međusobno povezani, moguće je, prilikom ubrzanja rotora, postaviti granicu vršne struje I1 = (1,5 - 2,5) Inom i sklopnu struju I2, koja treba da osigura uklopni moment M2 > Mc. Isključivanje asinhronih motora sa namotanim rotorom iz napojne mreže uvijek se izvodi s kratko spojenim krugom rotora, kako bi se izbjegla pojava prenapona u fazama namotaja statora, koji mogu premašiti nazivni napon ovih faza za 3 - 4 puta ako je krug rotora otvoren u trenutku gašenja motora.
34 Regulacija frekvencije. Ova metoda kontrole brzine omogućava korištenje najpouzdanijih i najjeftinijih asinhronih motora sa kaveznim rotorom. Međutim, za promjenu frekvencije napona napajanja potreban je izvor električne struje promjenjive frekvencije. Kao potonji, bilo sinhroni generatori sa promjenjiva frekvencija rotacioni, odnosno frekventni pretvarači - električni ili statički, izrađeni na kontrolisanim poluprovodničkim ventilima (tiristori). Trenutno frekventni pretvarači imaju prilično složen krug i relativno visoku cijenu. Međutim, brz razvoj energetske poluvodičke tehnologije omogućava nam da se nadamo daljem poboljšanju frekventnih pretvarača, što otvara izglede za široku upotrebu regulacije frekvencije. Detaljan opis zakona o kontroli za regulacija frekvencije i analiza rada asinhronog motora kada ga napaja frekventni pretvarač dati su u § 4.13 i 4.14. Regulacija promjenom broja polova. Ova regulacija vam omogućava da postignete stepenastu promjenu brzine rotacije. Na sl. 4.35 prikazano najjednostavnija šema(za jednu fazu), što vam omogućava da udvostručite broj polova namotaja statora. Da biste to učinili, svaka faza namotaja statora podijeljena je na dva dijela, koji se prebacuju iz serijske veze u paralelnu. Iz slike je jasno da kada su zavojnice 1-2 i 3-4 spojene u dvije paralelne grane, broj polova se prepolovi, a samim tim i frekvencija rotacije magnetskog polja se udvostručuje. Prilikom prebacivanja, broj zavoja povezanih u seriju u svakoj fazi se prepolovi, ali budući da se brzina rotacije udvostručuje, emf inducirana u fazi ostaje nepromijenjena. Posljedično, motor se može priključiti na mrežu s istim naponom pri obje brzine. Kako bi se izbjeglo prebacivanje namotaja rotora, izvodi se potonje kratkog spoja. Ako trebate imati tri ili četiri frekvencije rotacije, onda se na stator postavlja još jedan namotaj, pri prebacivanju možete dobiti dvije dodatne frekvencije. Asinhroni motori sa prebacivanjem broja polova nazivaju se multi-speed. Regulacija uključivanjem reostata u krug rotora. Kada su dodatni aktivni otpori povezani na kolo rotora R ext1, R ext2, R ext3 i drugi oblik zavisnosti se menja M = f(s) i mehaničke karakteristike n 2 = f(M) motor (sl. 4.37, a). Istovremeno, određeni moment opterećenja M n šibica s 1 , s 2 , s 3 , ..., veći od klizanja s e , kada motor radi na prirodnim karakteristikama (sa R ekst = 0). Posljedično, stabilna brzina motora opada od n e prije P 1 P 2 , P 3 ,... (Sl. 4.37, b). Ova metoda upravljanja može se koristiti samo za motore sa namotanim rotorom. Omogućava vam da glatko mijenjate brzinu rotacije u širokim granicama. Njegovi nedostaci su: a) veliki gubici energija u kontrolnom reostatu; b) preterano „meke“ mehaničke karakteristike motora sa visokim otporom u krugu rotora. U nekim slučajevima, ovo drugo je neprihvatljivo, jer mala promjena momenta opterećenja odgovara značajnoj promjeni brzine rotacije.
35 Asinhroni generator je asinhrona električna mašina (elektromotor) koja radi u generatorskom režimu. Uz pomoć pogonskog motora (u našem slučaju turbinskog motora), rotor asinhronog električnog generatora rotira se u istom smjeru kao i magnetsko polje. U tom slučaju proklizavanje rotora postaje negativno, na osovini asinkronog stroja pojavljuje se moment kočenja, a generator prenosi energiju u mrežu. Za uzbuđenje elektromotorna sila njegov izlazni krug koristi zaostalu magnetizaciju rotora. Za to se koriste kondenzatori. Asinhroni generatori nisu podložni kratkim spojevima. Asinhroni generator je jednostavniji od sinkronog (npr auto generator): ako potonji ima induktivne zavojnice postavljene na rotor, tada je rotor asinhronog generatora sličan običnom zamašnjaku. Takav generator je bolje zaštićen od prljavštine i vlage i otporniji je na kratki spoj i preopterećenja, a izlazni napon asinhronog električnog generatora ima niži stepen nelinearne distorzije. Ovo omogućava upotrebu asinhronih generatora ne samo za napajanje industrijskih uređaja koji nisu kritični za oblik ulaznog napona, već i za povezivanje elektronske opreme. To je asinhroni električni generator idealan izvor struja za uređaje sa aktivnim (omskim) opterećenjem: električni grijači, pretvarači za zavarivanje, lampe sa žarnom niti, elektronskih uređaja, kompjuterska i radio tehnika. Prednosti asinhronog generatora. Takve prednosti uključuju nizak faktor kliringa (harmonični koeficijent), koji karakteriše kvantitativno prisustvo u izlaznom naponu generatora višeg harmonika. Viši harmonici uzrokuju neravnomjernu rotaciju i nepotrebno zagrijavanje elektromotora. Sinhroni generatori mogu imati faktor kliringa do 15%, a faktor kliringa asinhronog električnog generatora ne prelazi 2%. Dakle, asinhroni električni generator proizvodi gotovo samo korisnu energiju. Još jedna prednost asinhronog električnog generatora je da u potpunosti nema rotirajući namotaji i elektroničke dijelove koji su osjetljivi na vanjske utjecaje i često podložni oštećenjima. Zbog toga asinhroni generator Malo je podložan habanju i može služiti veoma dugo. Izlaz naših generatora je odmah 220/380V AC, koji se može koristiti direktno za kućne aparate (na primjer, grijalice), za punjenje baterija, za povezivanje na pilanu, kao i za paralelni rad sa tradicionalnom mrežom. U tom slučaju plaćate razliku između onoga što se troši iz mreže i onoga što proizvodi vjetrenjača. Jer napon ide direktno na industrijske parametre, tada vam neće biti potrebni razni pretvarači (invertori) kada povezujete vjetrogenerator direktno na vaše opterećenje. Na primjer, možete se direktno povezati na pilanu i, u prisustvu vjetra, raditi kao da ste se jednostavno spojili na mrežu od 380 V. Kao što je poznato, za smanjenje vremena kočenja pri zaustavljanju proizvodnih mašina i mehanizama često se koriste mehaničke kočnice. Smanjenje vremena kočenja, posebno u slučaju kratkog radnog ciklusa, dovodi do značajnog povećanja produktivnosti mašina i mehanizama. Nedostaci mehaničkih kočnica su brzo trošenje trljajućih površina, složenost i potreba za periodičnim podešavanjem sile kočenja, te potreba za dodatnim prostorom za smještaj kočnice i njeno povezivanje s mehanizmom. Svi navedeni nedostaci se eliminiraju ako se u ove svrhe umjesto mehaničke kočnice koriste svojstva elektromotora za rad u režimima kočenja, odnosno, u suštini rade kao generator i razvijaju ne rotirajući, već kočni moment. U mnogim mašinama za dizanje i transport (dizalice, dizala, pokretne stepenice, itd.), gdje je moguće kretanje pod utjecajem gravitacije, osigurava se konstantna, stabilna brzina spuštanja tereta pomoću kočnog momenta elektromotora. Električni motori jednosmerna struja može raditi u tri načina kočenja:
U anti-switch modu;
U generatorskom režimu sa izlazom energije u mrežu;
U načinu dinamičkog kočenja.
U bilo kojem od načina kočenja, elektromotor radi kao generator, pretvarajući, na primjer, kinetičku energiju pokretnih dijelova ili potencijalna energija silazne težine u električnu energiju.
36 Prilikom okretanja motora unatrag dok se kreće prebacivanjem prekidača, motor se prvo usporava sa date brzine na nulu, a zatim se ubrzava u drugom smjeru. Takvo kočenje se može koristiti i za kočenje tokom tzv protiv inkluzije. Kod takvog kretanja unazad ili kočenja, u asinhronom motoru sa kaveznim rotorom nastaju značajne struje. Stoga, na osnovu uslova grijanja za ove motore, broj preokreta po satu nije veći od desetina. Da bi se ograničile struje i povećali momenti, otpor se uvodi u krug faznog rotora asinhronog motora. Razmotrimo tri glavne metode električnog kočenja asinhronih motora. Kočenje metodom kontra-prekidanja, kao što je navedeno, proizvodi se kada se motor uključi u pokretu. U tom slučaju magnetsko polje rotira u suprotnom smjeru u odnosu na smjer rotacije motora, a moment motora je kočni - djeluje protiv smjera rotacije. Generatorsko kočenje nastaje kada se višebrzinski motor u hodu uključi sa veće brzine na nižu, tj. prilikom prebacivanja mašine sa manjeg broja stubova na veći. U prvom trenutku prebacivanja, broj obrtaja motora je mnogo veći od brzine njegovog polja, odnosno klizanje se ispostavlja negativnim i mašina prelazi na rad kao generator. Kočenje se događa pretvaranjem kinetičke energije rotirajućih dijelova u električna energija, koji se, minus gubici u mašini, šalje u mrežu. Generatorsko kočenje se takođe može koristiti u liftu kada se spušta težak teret, ubrzavajući motor do brzine koja prelazi sinhroni; tada mašina počinje da oslobađa u mrežu energiju koju joj prenosi silazno opterećenje. Kočenje u režimu rada generatora moguće je samo pri supersinhronoj brzini. Ako se motor mora zaustaviti na kraju kočenja, onda na kraju kočenja treba preći na mehaničko kočenje ili drugu vrstu električnog kočenja (dinamičko, povratno). Ako je potrebno, položaj na kraju može se osigurati samo pomoću mehaničke kočnice. At dinamičko kočenje Namotaj statora motora je isključen trofazna mreža i priključen je na jednosmernu ili jednofaznu mrežu naizmjenične struje. U ovom slučaju su mogući različiti načini povezivanja faza namotaja statora. Namotaj statora, napajan jednosmjernom strujom, stvara stacionarno magnetsko polje. Baš kao što tokom normalnog rada motora njegovo rotirajuće polje vuče rotor zajedno sa sobom, stacionarno polje tokom dinamičkog kočenja uzrokuje da se rotor brzo zaustavi. Kinetička energija rotirajućih dijelova pretvara se u toplinu koja se oslobađa u krugu rotora zbog struja koje u njemu inducira stacionarno polje statora. Glatko kočenje je osigurano regulacijom napona na stezaljkama statora.Moment kočenja motora sa namotanim rotorom također se može regulisati pomoću reostata u krugu rotora. Nedostatak dinamičkog kočenja je što zahtijeva niskonaponski istosmjerni izvor.
37 Sinhrona mašina je električna mašina naizmenične struje, čija je brzina rotora jednaka brzini rotacije magnetnog polja u vazdušnom rasporu. Glavni dijelovi sinhrone mašine su armatura i induktor. Najčešći dizajn je onaj u kojem se armatura nalazi na statoru, a induktor se nalazi na rotoru odvojenom od njega zračnim rasporom. Armatura se sastoji od jednog ili više namotaja naizmjenične struje. U motorima, struje ubrizgane u armaturu stvaraju rotirajuće magnetsko polje, koje se spaja s poljem induktora i tako dolazi do konverzije energije. Polje armature utječe na polje induktora i stoga se naziva armaturno reakcijsko polje. U generatorima se stvara reakciono polje armature naizmenične struje induciran u namotaju armature iz induktora. Induktor se sastoji od polova - jednosmjernih elektromagneta ili trajnih magneta (kod mikromašina). Induktori sinhrone mašine imaju dva razni dizajni: salient-pole ili non-slient-pole. Mašina sa istaknutim polovima odlikuje se činjenicom da su polovi izraženi i imaju dizajn sličan polovima DC mašine. Kod dizajna sa neispadljivim polom, pobudni namot je postavljen u žljebove jezgre induktora, vrlo slično namotaju rotora asinhronih strojeva sa namotanim rotorom, s jedinom razlikom što između polova postoji razmak ostavljen neispunjen provodnicima (tzv veliki zub). Neizraženi dizajn stubova se koristi u mašinama velike brzine za smanjenje mehaničkog opterećenja na stubovima. Za smanjenje magnetskog otpora, odnosno za poboljšanje prolaska magnetskog fluksa, koriste se feromagnetna jezgra rotora i statora. U osnovi, oni su laminirana konstrukcija izrađena od elektro čelika (odnosno sastavljena od zasebnih listova). Električni čelik ima nekoliko zanimljiva svojstva. Između ostalog, ima visok sadržaj silicija kako bi povećao svoj električni otpor i time smanjio vrtložne struje.
Na polove rotora i statora djeluju elektromagnetne rotacijske sile.
momenti koji su jednaki po veličini i usmjereni u suprotnim smjerovima.
Snaga potrebna za rotaciju polova statora na sinhronoj frekvenciji je
gdje je ugaona brzina.
Mehanička snaga koju razvija rotor je

Gdje  - ugaona brzina rotora.
- ugaona brzina rotora.
Razlika u snazi
gdje je R E2 - električni gubici u namotaju rotora;
m 2 - broj faza namotaja rotora;
R 2 - aktivni otpor namotaja rotora;
I 2 - struja rotora.
gdje 
Moment:
 (12.4).
(12.4).
gdje je CT omjer transformacije motora sa blokiranim rotorom,
 - konstantno.
- konstantno.
Na sl. Slika 12.5 prikazuje zavisnost elektromagnetnog momenta od klizanja u obliku pune linije.

Neka aktuator pokretan ovim motorom stvara protupokretni kočni moment M2.
Na slici 12.5 postoje dvije tačke za koje je tačna jednakost M em = M 2
;
ovo su tačke A
I V
.
U tački A
motor radi stabilno. Ako motor, pod utjecajem bilo kojeg razloga, smanji brzinu rotacije, tada će se njegovo klizanje povećati, a zajedno s njim i okretni moment. Zahvaljujući tome, brzina motora će se povećati i ravnoteža će se ponovo uspostaviti. M em = M 2
;.
U tački V
rad motora ne može biti stabilan: nasumično odstupanje brzina rotacije će ili zaustaviti motor ili dovesti do toga da dostigne tačku A
.
Posljedično, čitava uzlazna grana karakteristike je regija stabilan rad motora, a cijeli nizvodni dio je područje nestabilnog rada. Dot b
, koji odgovara maksimalnom momentu, razdvaja područja stabilnog i nestabilnog rada.
Maksimalna vrijednost momenta odgovara kritičnom proklizavanju S k
. Klizanje S=1
odgovara početnom momentu. Ako je veličina momenta suprotstavljanja kočenja M 2
više od startnog MP, motor se neće pokrenuti kada se uključi i ostat će nepomičan.
Mehanička karakteristika asinhronog motora je ovisnost brzine motora o momentu na osovini n 2 = f (M 2). Mehanička karakteristika se dobija pod uslovom U 1 - const, f 1 - const. Mehanička karakteristika motora je zavisnost obrtnog momenta od klizanja, ucrtana u različitoj skali. Na sl. Slika 12.6 prikazuje tipičnu mehaničku karakteristiku asinhronog motora.
S povećanjem opterećenja, okretni moment na osovini raste do određene maksimalne vrijednosti, a brzina rotacije se smanjuje. U pravilu, asinhroni motor ima početni moment manji od maksimalnog. Ovo se objašnjava činjenicom da je u startnom režimu, kada je n 2 = 0 i S = 1, asinhroni motor u režimu sličnom kratkom spoju u transformatoru. Magnetno polje rotora je usmjereno suprotno od magnetnog polja statora.
Rezultirajući, odnosno glavni, magnetni tok u zračnom rasporu mašine u startnom režimu, kao i emf u statoru i rotoru E 1 i E 2, značajno su smanjeni. To dovodi do smanjenja startnog momenta motora i naglog povećanja startne struje.
12.4. Regulacija brzine rotacije asinhronih motora.
Reversiranje asinhronog motora
Iz formule (12.2) dobijamo
 . (12.11)
. (12.11)
Iz formule (12.11) jasno je da se brzina rotacije asinhronog motora može mijenjati na tri načina:
1. promjena frekvencije napona napajanja;
2. promjena broja polova motora. Da biste to učinili, u utore statora se postavlja namotaj, koji se može prebaciti na različit broj polova;
3. promjena klizanja. Ova metoda se može koristiti u asinhronim motorima s namotanim rotorom. Da biste to učinili, u krug rotora uključen je reostat za podešavanje. Povećanje aktivnog otpora kruga rotora dovodi do povećanja klizanja od S a do S g (vidi sliku 12.5), i, posljedično, do smanjenja brzine motora.
Asinhroni motori imaju jednostavan dizajn i pouzdan u radu. Nedostatak asinhronih motora je teškoća regulacije njihove brzine rotacije.
Za obrnuti trofazni asinhroni motor (promjeniti smjer rotacije motora u suprotan), potrebno je zamijeniti dvije faze, odnosno zamijeniti bilo koje dvije linearne žice prikladne za namotaj statora motora.
Napon U 1 primijenjen na fazu namota statora uravnotežen je glavnom emf E 1 , emf curenja i padom napona na aktivnom otporu namota statora:
U namotu rotora, slična jednačina će izgledati ovako:
Ali pošto je namotaj rotora zatvoren, napon U 2 =0, a ako uzmemo u obzir i da je E 2s = SE 2 i x 2s = Sx 2, onda se jednačina može prepisati kao:
![]()
Trenutna jednačina za asinhroni motor ponavlja sličnu jednačinu za transformator:
28 Obrtni moment asinhronog motora
Obrtni moment u asinhronom motoru nastaje interakcijom struje rotora sa magnetnim poljem mašine. Moment se matematički može izraziti u smislu elektromagnetne snage mašine:
Gdje w 1 =2pn 1 /60 - ugaona frekvencija rotacije polja. sa svoje strane, n 1 =f 1 60/R, Onda
![]()
Zamenimo formulu M 1 izraz REm=Pe2/S i podijelimo sa 9,81, dobijemo:
![]()
Jednačina momenta indukcionog motora
Iz toga slijedi da je moment motora proporcionalan električnim gubicima u rotoru. Zamijenimo trenutnu vrijednost u posljednju formulu I 2 ’ :
dobijamo jednačinu za moment asinhronog motora:
Gdje U 1 - fazni napon namotaja statora.
29 .Mehaničke karakteristike motora naziva se zavisnost brzine rotora od momenta na osovini n = f (M2). Budući da je moment praznog hoda mali pod opterećenjem, M2 ≈ M, a mehanička karakteristika je predstavljena ovisnošću n = f (M). Ako uzmemo u obzir odnos s = (n1 - n) / n1, tada se mehanička karakteristika može dobiti prikazom njene grafičke zavisnosti u koordinatama n i M (slika 1).
Rice. 1. Mehaničke karakteristike asinhronog motora
Prirodne mehaničke karakteristike indukcionog motora odgovara glavnom (sertifikatnom) kolu njegovog priključka i nazivnim parametrima napona napajanja. Veštačke karakteristike dobijaju se ako su uključeni neki dodatni elementi: otpornici, prigušnici, kondenzatori. Kada se motor napaja nenaglašenim naponom, karakteristike se također razlikuju od prirodnih mehaničkih karakteristika.
Mehaničke karakteristike su vrlo zgodan i koristan alat za analizu statičkih i dinamičkih načina rada električnog pogona.
30 Mehaničke karakteristike i samoregulacija motora. Grafikon koji povezuje mehaničke veličine - brzinu i moment - naziva se mehanička karakteristika asinhronog motora (slika 7) n = ƒ(M). Samoregulacija asinhronog motora je sljedeća. Neka motor radi stabilno u nekom režimu, razvijajući brzinu n1 i obrtni moment M1. Uz ravnomjernu rotaciju, ovaj moment jednak je momentu kočenja M t1, tj. M1=M T 1, n1= konset. Povećanje momenta kočenja na M2 će uzrokovati smanjenje brzine stroja, budući da će kočni moment postati veći od momenta. Kako se brzina smanjuje, klizanje se povećava, što zauzvrat uzrokuje povećanje emf i struje u rotoru. Ovo povećava obrtni moment motora. Ovaj proces se završava kada obrtni moment M2 koji razvija motor postane jednak M T 2. U ovom slučaju, brzina rotacije je podešena niža od n1. Svojstvo automatskog uspostavljanja ravnoteže između kočenja i obrtnog momenta se naziva samoregulacija.
Na laboratorijskom stolu motor je opterećen električnom kočnicom, koja se sastoji od elektromagneta, u čijem se procjepu okreće disk postavljen na osovinu motora. Promjenom napona koji napaja zavojnicu elektromagneta sa ručkom autotransformatora, možete promijeniti silu kočenja, čiji je moment jednak: M KOČNICA = F r (N m)
gdje je F sila (sila) koja djeluje na obim remenice, (N);
r je polumjer remenice, jednak 0,18 m. Neto snaga na osovini motora:
Gdje n- brzina vrtnje motora, o/min.
gdje je ƒ frekvencija mreže (jednaka 50 Hz),
R- broj parova polova namotaja statora (jednako 2).
n 1 - sinhrona brzina rotirajućeg magnetnog polja.
Brzina rotacije motora se određuje pomoću tahometra. Klizanje se izračunava pomoću formule:
31 Karakteristike performansi nazivaju se zavisnosti snage koju troši motor, potrošnje struje I, faktora snage, brzine rotacije motora, efikasnosti i obrtnog momenta M od korisne snage motora dostavljene osovini. Karakteristike performansi određuju osnovna radna svojstva asinhronog motora. Karakteristike performansi asinhronog motora srednje snage prikazane su na Sl. 8.8. Njihovo ponašanje je objašnjeno na sljedeći način. Pri malim opterećenjima, struja koju troši motor I (struja bez opterećenja) može se kretati od 20 do 70% nazivne struje. Kako se opterećenje povećava, struja u krugu rotora raste, što dovodi do gotovo proporcionalnog povećanja struje I u strujnom kolu statora.
Slika 8.8 Obrtni moment motora () također je gotovo proporcionalan opterećenju, ali pri velikim opterećenjima linearnost grafikona je donekle poremećena zbog smanjenja brzine vrtnje motora. Karakteristika performansi izražava odnos između snage koju razvija motor i faznog pomaka između struje i napona statora. Asinhroni motor, poput transformatora, troši struju I iz mreže, koja je značajno van faze sa primijenjenim naponom. Na primjer, u stanju mirovanja. Kako raste opterećenje na osovini motora, aktivne komponente rotora i statora rastu, povećavajući se . Maksimalna vrijednost je dostignuta na .
Daljnjim povećanjem vrijednost će se lagano smanjiti. To se objašnjava povećanjem klizanja s, što uzrokuje povećanje reaktanse namota rotora, a samim tim i fazni pomak . WITH povećava i, tj. će se smanjiti.
Ponašanje radne karakteristike je objašnjeno kako slijedi. Vrijednost efikasnosti određena je omjerom korisne snage i snage koja se troši iz mreže.
Količina se zove gubitak snage. Pored gubitaka u čeliku statora i rotora zbog preokretanja magnetizacije i vrtložnih struja, koji se zajedno sa mehaničkim gubicima mogu smatrati konstantnim, kod asinhronog motora postoje gubici u bakru. ,
one. u namotajima statora i rotora, koji su proporcionalni kvadratu struje koja teče i stoga ovise o opterećenju. Za vrijeme rada bez opterećenja, kao kod transformatora, dominiraju gubici u čeliku, jer je a jednako struji praznog hoda, koja je mala. Pri malim opterećenjima na osovini, gubici u bakru i dalje ostaju mali, a samim tim i efikasnost, određena formulom ![]() (8.5)
(8.5)
sa povećanjem, prvo naglo raste. Kada konstantni gubici postanu jednaki gubicima zavisnim od opterećenja , efikasnost dostiže svoju maksimalnu vrijednost. Sa daljim povećanjem opterećenja, promenljivi gubici snage se značajno povećavaju, što rezultira efikasnošću. primjetno opada. Priroda zavisnosti ) može se objasniti iz relacije . Ako je efikasnost bila konstantna, tada bi postojao linearni odnos između i. Ali pošto efikasnost zavisi od i ova zavisnost u početku naglo raste, a sa daljim povećanjem opterećenja neznatno se menja, onda kriva ) U početku polako raste, a zatim naglo raste.
32 U svakom električnom kolu, zbir snaga svih izvora električne energije mora biti jednak zbroju snaga svih prijemnika i pomoćnih elemenata. Nakon što smo prethodno dobili izraze snage, možemo općenito napisati jednadžbu ravnoteže snage za bilo koje električno kolo:
Σ E → I → + Σ U ← I → = Σ E ← I → + Σ U → I → + Σ I 2 r.
Jednačina (1.35) se može napisati kako za stvarne smjerove emf, napona i struja, tako i za slučaj kada su neki od njih proizvoljno odabrani pozitivnim smjerovima. U prvom slučaju, svi članovi u njemu će biti pozitivni i odgovarajući elementi kola će zapravo biti izvori ili prijemnici električne energije. Ako su neki pojmovi napisani uzimajući u obzir proizvoljno odabrane pozitivne smjerove, odgovarajući elementi se moraju smatrati pretpostavljenim izvorima i primaocima. Kao rezultat izračuna ili analize, neki od njih mogu biti negativni. To će značiti da su neki od navodnih izvora zapravo prijemnik, a neki od pretpostavljenih prijemnika zapravo izvor.
33 Pokretanje asinhronog motora je praćen prolaznim procesom stroja koji je povezan s prijelazom rotora iz stanja mirovanja u stanje ravnomjerne rotacije, u kojem obrtni moment motora uravnotežuje moment sila otpora na osovinu stroja. Prilikom pokretanja asinhronog motora dolazi do povećane potrošnje električne energije iz napojne mreže koja se troši ne samo na savladavanje kočionog momenta primijenjenog na osovinu i pokrivanje gubitaka u samom asinkronom motoru, već i na prenošenje određene kinetičke energije. na pokretne dijelove proizvodne jedinice. Stoga, prilikom pokretanja, asinhroni motor mora razviti povećani moment. Za asinhroni motor sa namotanim rotorom početni startni moment koji odgovara klizanju sp = 1 zavisi od aktivnog otpora podesivih otpornika uvedenih u kolo rotora.
Rice. 1. Pokretanje trofaznog asinhronog motora sa namotanim rotorom: a - grafikoni zavisnosti momenta motora sa namotanim rotorom od klizanja pri različitim aktivnim otporima otpornika u kolu rotora, b - dijagram uključivanja otpornicima i zatvarajućim kontaktima za ubrzanje u krugu rotora. Dakle, sa zatvorenim kontaktima ubrzanja U1, U2, tj. pri pokretanju asinhronog motora sa kratkospojnim kliznim prstenovima, početni moment pokretanja Mn1 = (0,5 -1,0) Mnom, a početna startna struja Ip = (4,5 - 7) Inom i više. Mali početni moment pokretanja asinhronog elektromotora s namotanim rotorom može biti nedovoljan za pogon proizvodne jedinice i njeno naknadno ubrzanje, a značajna startna struja će uzrokovati pojačano zagrijavanje namota motora, što ograničava učestalost njegovog uključivanja, a u mrežama male snage dovodi do nepoželjnog rada ostalih prijemnika privremeni pad napona. Ove okolnosti mogu biti razlog koji onemogućuje upotrebu asinhronih motora sa namotanim rotorom sa velikom startnom strujom za pogon pogonskih mehanizama. Uvođenje podesivih otpornika, nazvanih startni otpornici, u krug rotora motora ne samo da smanjuje početnu startnu struju, već istovremeno povećava početni moment pokretanja, koji može dostići maksimalni moment Mmax (slika 1, a, kriva 3 ), ako je kritično proklizavanje motora sa namotanim rotorom skr = (R2" + Rd") / (X1 + X2") = 1, gdje je Rd" aktivni otpor otpornika koji se nalazi u fazi rotora motora namotaj, sveden na fazu namotaja statora. Daljnje povećanje aktivnog otpora startnog otpornika je nepraktično, jer dovodi do slabljenja početnog startnog momenta i ulaska tačke maksimalnog momenta u klizno područje s > 1, što eliminiše mogućnost ubrzanja rotora. Potreban aktivni otpor otpornika za pokretanje motora sa namotanim rotorom određuje se na osnovu zahtjeva za pokretanje, što može biti lako kada je Mn = (0,1 - 0,4) Mnom, normalno ako je Mn - (0,5 - 0,75) Mn, a teško kada je Mn ≥ Mn. Za održavanje dovoljno velikog obrtnog momenta motorom sa namotanim rotorom tijekom ubrzanja proizvodne jedinice kako bi se skratilo trajanje prijelaznog procesa i smanjilo zagrijavanje motora, potrebno je postupno smanjivati aktivni otpor startnih otpornika. Dozvoljena promjena momenta za vrijeme ubrzanja M(t) određena je električnim i mehaničkim uvjetima koji ograničavaju granicu vršnog momenta M > 0,85 Mmax, uklopni moment M2 > > Ms (Sl. 2), kao i ubrzanje.
Rice. 2. Početne karakteristike trofaznog asinhronog motora sa namotanim rotorom. Prebacivanje startnih otpornika osigurava se naizmjeničnim uključivanjem kontaktora ubrzanja Y1, Y2, odnosno u vremenima t1, t2 računajući od trenutka pokretanja motora, kada pri ubrzanju moment M postaje jednak uklopnom momentu M2. Zahvaljujući tome, tokom cijelog pokretanja, svi vršni momenti su isti i svi momenti uključivanja jednaki su jedni drugima. Budući da su moment i struja asinhronog motora sa namotanim rotorom međusobno povezani, moguće je, prilikom ubrzanja rotora, postaviti granicu vršne struje I1 = (1,5 - 2,5) Inom i sklopnu struju I2, koja treba da osigura uklopni moment M2 > Mc. Isključivanje asinhronih motora sa namotanim rotorom iz napojne mreže uvijek se izvodi s kratko spojenim krugom rotora, kako bi se izbjegla pojava prenapona u fazama namotaja statora, koji mogu premašiti nazivni napon ovih faza za 3 - 4 puta ako je krug rotora otvoren u trenutku gašenja motora.
34 Regulacija frekvencije. Ova metoda kontrole brzine omogućava korištenje najpouzdanijih i najjeftinijih asinhronih motora sa kaveznim rotorom. Međutim, za promjenu frekvencije napona napajanja potreban je izvor električne struje promjenjive frekvencije. Kao potonji, koriste se ili sinhroni generatori s promjenjivom brzinom, ili frekventni pretvarači - električni strojevi ili statički, izrađeni na kontroliranim poluvodičkim ventilima (tiristori). Trenutno frekventni pretvarači imaju prilično složen krug i relativno visoku cijenu. Međutim, brz razvoj energetske poluvodičke tehnologije omogućava nam da se nadamo daljem poboljšanju frekventnih pretvarača, što otvara izglede za široku upotrebu regulacije frekvencije. Detaljan opis zakona upravljanja za regulaciju frekvencije i analiza rada asinhronog motora kada ga napaja frekventni pretvarač dati su u § 4.13 i 4.14. Regulacija promjenom broja polova. Ova regulacija vam omogućava da postignete stepenastu promjenu brzine rotacije. Na sl. Slika 4.35 prikazuje najjednostavniji krug (za jednu fazu), koji vam omogućava da udvostručite broj polova namotaja statora. Da biste to učinili, svaka faza namotaja statora podijeljena je na dva dijela, koji se prebacuju iz serijske veze u paralelnu. Iz slike je jasno da kada su zavojnice 1-2 i 3-4 spojene u dvije paralelne grane, broj polova se prepolovi, a samim tim i frekvencija rotacije magnetskog polja se udvostručuje. Prilikom prebacivanja, broj zavoja povezanih u seriju u svakoj fazi se prepolovi, ali budući da se brzina rotacije udvostručuje, emf inducirana u fazi ostaje nepromijenjena. Posljedično, motor se može priključiti na mrežu s istim naponom pri obje brzine. Kako bi se izbjeglo prebacivanje namotaja rotora, izvodi se potonje kratkog spoja. Ako trebate imati tri ili četiri frekvencije rotacije, onda se na stator postavlja još jedan namotaj, pri prebacivanju možete dobiti dvije dodatne frekvencije. Asinhroni motori sa prebacivanjem broja polova nazivaju se multi-speed. Regulacija uključivanjem reostata u krug rotora. Kada su dodatni aktivni otpori povezani na kolo rotora R ext1, R ext2, R ext3 i drugi oblik zavisnosti se menja M = f(s) i mehaničke karakteristike n 2 = f(M) motor (sl. 4.37, a). Istovremeno, određeni moment opterećenja M n šibica s 1 , s 2 , s 3 , ..., veći od klizanja s e , kada motor radi na prirodnim karakteristikama (sa R ekst = 0). Posljedično, stabilna brzina motora opada od n e prije P 1 P 2 , P 3 ,... (Sl. 4.37, b). Ova metoda upravljanja može se koristiti samo za motore sa namotanim rotorom. Omogućava vam da glatko mijenjate brzinu rotacije u širokom rasponu. Njegovi nedostaci su: a) veliki gubici energije u kontrolnom reostatu; b) preterano „meke“ mehaničke karakteristike motora sa visokim otporom u krugu rotora. U nekim slučajevima, ovo drugo je neprihvatljivo, jer mala promjena momenta opterećenja odgovara značajnoj promjeni brzine rotacije.
35 Asinhroni generator je asinhrona električna mašina (elektromotor) koja radi u generatorskom režimu. Uz pomoć pogonskog motora (u našem slučaju turbinskog motora), rotor asinhronog električnog generatora rotira se u istom smjeru kao i magnetsko polje. U tom slučaju proklizavanje rotora postaje negativno, na osovini asinkronog stroja pojavljuje se moment kočenja, a generator prenosi energiju u mrežu. Za pobuđivanje elektromotorne sile u njegovom izlaznom krugu koristi se zaostala magnetizacija rotora. Za to se koriste kondenzatori. Asinhroni generatori nisu podložni kratkim spojevima. Asinhroni generator je dizajniran jednostavnije od sinkronog generatora (na primjer, automobilskog generatora): ako potonji ima induktivne zavojnice postavljene na svom rotoru, tada je rotor asinhronog generatora sličan običnom zamašnjaku. Takav generator je bolje zaštićen od prljavštine i vlage, otporniji je na kratke spojeve i preopterećenja, a izlazni napon asinhronog električnog generatora ima niži stupanj nelinearnog izobličenja. Ovo omogućava upotrebu asinhronih generatora ne samo za napajanje industrijskih uređaja koji nisu kritični za oblik ulaznog napona, već i za povezivanje elektronske opreme. To je asinhroni električni generator koji je idealan izvor struje za uređaje sa aktivnim (omskim) opterećenjem: električne grijače, pretvarače za zavarivanje, žarulje sa žarnom niti, elektronske uređaje, kompjutersku i radio opremu. Prednosti asinhronog generatora . Takve prednosti uključuju nizak čisti faktor (harmonički faktor), koji karakterizira kvantitativno prisustvo viših harmonika u izlaznom naponu generatora. Viši harmonici uzrokuju neravnomjernu rotaciju i nepotrebno zagrijavanje elektromotora. Sinhroni generatori mogu imati faktor kliringa do 15%, a faktor kliringa asinhronog električnog generatora ne prelazi 2%. Dakle, asinhroni električni generator proizvodi gotovo samo korisnu energiju. Još jedna prednost asinhronog električnog generatora je da u potpunosti nema rotirajući namotaji i elektroničke dijelove koji su osjetljivi na vanjske utjecaje i često podložni oštećenjima. Stoga je asinhroni generator podložan malom habanju i može služiti jako dugo. Izlaz naših generatora je odmah 220/380V AC, koji se može koristiti direktno za kućne aparate (na primjer, grijalice), za punjenje baterija, za povezivanje na pilanu, kao i za paralelni rad sa tradicionalnom mrežom. U tom slučaju plaćate razliku između onoga što se troši iz mreže i onoga što proizvodi vjetrenjača. Jer napon ide direktno na industrijske parametre, tada vam neće biti potrebni razni pretvarači (invertori) kada povezujete vjetrogenerator direktno na vaše opterećenje. Na primjer, možete se direktno povezati na pilanu i, u prisustvu vjetra, raditi kao da ste se jednostavno spojili na mrežu od 380 V. Kao što je poznato, za smanjenje vremena kočenja pri zaustavljanju proizvodnih mašina i mehanizama često se koriste mehaničke kočnice. Smanjenje vremena kočenja, posebno u slučaju kratkog radnog ciklusa, dovodi do značajnog povećanja produktivnosti mašina i mehanizama. Nedostaci mehaničkih kočnica su brzo trošenje trljajućih površina, složenost i potreba za periodičnim podešavanjem sile kočenja, te potreba za dodatnim prostorom za smještaj kočnice i njeno povezivanje s mehanizmom. Svi navedeni nedostaci se eliminiraju ako se u ove svrhe umjesto mehaničke kočnice koriste svojstva elektromotora za rad u režimima kočenja, odnosno, u suštini rade kao generator i razvijaju ne rotirajući, već kočni moment. U mnogim mašinama za dizanje i transport (dizalice, dizala, pokretne stepenice, itd.), gdje je moguće kretanje pod utjecajem gravitacije, osigurava se konstantna, stabilna brzina spuštanja tereta pomoću kočnog momenta elektromotora. DC motori mogu raditi u tri načina kočenja:
U anti-switch modu;
U generatorskom režimu sa izlazom energije u mrežu;
U načinu dinamičkog kočenja.
U bilo kojem od načina kočenja, elektromotor radi kao generator, pretvarajući, na primjer, kinetičku energiju pokretnih dijelova ili potencijalnu energiju spuštenog opterećenja u električnu energiju.
36 Prilikom okretanja motora unatrag dok se kreće prebacivanjem prekidača, motor se prvo usporava sa date brzine na nulu, a zatim se ubrzava u drugom smjeru. Takvo kočenje se može koristiti i za kočenje tokom tzv protiv inkluzije. Kod takvog kretanja unazad ili kočenja, u asinhronom motoru sa kaveznim rotorom nastaju značajne struje. Stoga, na osnovu uslova grijanja za ove motore, broj preokreta po satu nije veći od desetina. Da bi se ograničile struje i povećali momenti, otpor se uvodi u krug faznog rotora asinhronog motora. Razmotrimo tri glavne metode električnog kočenja asinhronih motora. Kočenje metodom kontra-prekidanja, kao što je navedeno, proizvodi se kada se motor uključi u pokretu. U tom slučaju magnetsko polje rotira u suprotnom smjeru u odnosu na smjer rotacije motora, a moment motora je kočni - djeluje protiv smjera rotacije. Generatorsko kočenje nastaje kada se višebrzinski motor u hodu uključi sa veće brzine na nižu, tj. prilikom prebacivanja mašine sa manjeg broja stubova na veći. U prvom trenutku prebacivanja, broj obrtaja motora je mnogo veći od brzine njegovog polja, odnosno klizanje se ispostavlja negativnim i mašina prelazi na rad kao generator. Kočenje se događa pretvaranjem kinetičke energije rotirajućih dijelova u električnu energiju, koja se, minus gubici u stroju, prenosi u mrežu. Generatorsko kočenje se takođe može koristiti u liftu kada se spušta težak teret, ubrzavajući motor do brzine koja prelazi sinhroni; tada mašina počinje da oslobađa u mrežu energiju koju joj prenosi silazno opterećenje. Kočenje u režimu rada generatora moguće je samo pri supersinhronoj brzini. Ako se motor mora zaustaviti na kraju kočenja, onda na kraju kočenja treba preći na mehaničko kočenje ili drugu vrstu električnog kočenja (dinamičko, povratno). Ako je potrebno, položaj na kraju može se osigurati samo pomoću mehaničke kočnice. At dinamičko kočenje Namotaj statora motora se odvaja od trofazne mreže i spaja na jednosmernu ili jednofaznu mrežu naizmjenične struje. U ovom slučaju su mogući različiti načini povezivanja faza namotaja statora. Namotaj statora, napajan jednosmjernom strujom, stvara stacionarno magnetsko polje. Baš kao što tokom normalnog rada motora njegovo rotirajuće polje vuče rotor zajedno sa sobom, stacionarno polje tokom dinamičkog kočenja uzrokuje da se rotor brzo zaustavi. Kinetička energija rotirajućih dijelova pretvara se u toplinu, koja se oslobađa u krugu rotora zbog struja koje u njemu inducira stacionarno polje statora. Glatko kočenje je osigurano regulacijom napona na stezaljkama statora.Moment kočenja motora sa namotanim rotorom također se može regulisati pomoću reostata u krugu rotora. Nedostatak dinamičkog kočenja je što zahtijeva niskonaponski istosmjerni izvor.
37 Sinhrona mašina je električna mašina naizmenične struje, čija je brzina rotora jednaka brzini rotacije magnetnog polja u vazdušnom rasporu. Glavni dijelovi sinhrone mašine su armatura i induktor. Najčešći dizajn je onaj u kojem se armatura nalazi na statoru, a induktor se nalazi na rotoru odvojenom od njega zračnim rasporom. Armatura se sastoji od jednog ili više namotaja naizmjenične struje. U motorima, struje ubrizgane u armaturu stvaraju rotirajuće magnetsko polje, koje se spaja s poljem induktora i tako dolazi do konverzije energije. Polje armature utječe na polje induktora i stoga se naziva armaturno reakcijsko polje. U generatorima, reakciono polje armature se stvara naizmeničnim strujama indukovanim u namotaju armature iz induktora. Induktor se sastoji od polova - jednosmjernih elektromagneta ili trajnih magneta (kod mikromašina). Induktori sinhronih mašina imaju dva različita dizajna: sa istaknutim polovima ili sa neispadljivim polovima. Mašina sa istaknutim polovima odlikuje se činjenicom da su polovi izraženi i imaju dizajn sličan polovima DC mašine. Kod dizajna sa neispadljivim polom, pobudni namot je postavljen u žljebove jezgre induktora, vrlo slično namotaju rotora asinhronih strojeva sa namotanim rotorom, s jedinom razlikom što između polova postoji razmak ostavljen neispunjen provodnicima (tzv veliki zub). Neizraženi dizajn stubova se koristi u mašinama velike brzine za smanjenje mehaničkog opterećenja na stubovima. Za smanjenje magnetskog otpora, odnosno za poboljšanje prolaska magnetskog fluksa, koriste se feromagnetna jezgra rotora i statora. U osnovi, oni su laminirana konstrukcija izrađena od elektro čelika (odnosno sastavljena od zasebnih listova). Električni čelik ima niz zanimljivih svojstava. Između ostalog, ima visok sadržaj silicija kako bi povećao svoj električni otpor i time smanjio vrtložne struje.
 (1 ocjene, u prosjeku: 5,00 od 5)
(1 ocjene, u prosjeku: 5,00 od 5) 

