Въртящ момент на асинхронен двигател. Извеждане на формулата. Номинален, критичен и пусков момент
Действие магнитно полена ход с ток ви позволява да го използвате, за да определите модул за магнитна индукция.Въртенето на намотката в магнитно поле показва, че върху нея действат поне две сили. Резултатите от тези сили ще бъдат приложени в точки A и B (фиг. 6.8). Въртящ момент, действаща на завоя, ще бъде равна на произведението на една от тези сили F̅на радиус на завой r.Този момент не трябва да се изчислява. Може да се измери с помощта на спирална пружина или друго устройство за измерване на въртящия момент, свързано към бобината.
Експериментите показват, че намотка с ток в магнитно поле винаги се завърта така, че посоката на нейната нормална нсъвпада с посоката на магнитната индукция на изследваното поле B̅.Очевидно в този случай въртящият момент ще бъде нула. Тя ще има максимална стойност, когато ъгълът между магнитната индукция B̅и нормално нще бъде равен на 90°.
Магнитната индукция може да се определи чрез силовия ефект на магнитното поле върху vi-ток с ток.
Без да променяме силата на тока в проводника, разглеждаме как зависи стойността максимален въртящ моментвърху параметрите на бобината.
След като поставим бобината на определено разстояние от проводника, носещ ток, измерваме максималния въртящ момент Mмаксза определена стойност на тока в завой аз 1. Нека удвоим тока в завоя. При аз 2 = 2аз 1максималният механичен момент ще бъде равен на M max 2 = 2M max 1. Ще наблюдаваме същото, когато токът се увеличи 3, 4, 5 пъти. По този начин, максимална стойност на въртящия момент, който действа върху намотката с ток, ще бъде пропорционално на тока в завоя
M max ~аз вит.
Въртящ момент , действащ на завой в магнитно поле, е пропорционален на силата на тока в него.Материал от сайта
Ако смените тази намотка с друга, с по-голяма или по-малка площ S вит, тогава ще забележим съответно увеличение или намаляване на стойността на максималния въртящ момент. По този начин,
максимален въртящ момент , който действа на завой в магнитно поле, е пропорционален на неговата площ:
M max ~S вит.
Комбинирайки резултатите от двата етапа на изследването, получаваме
M max ~аз вит.S вит.
На тази страница има материали по следните теми:
Напрежението U 1, приложено към фазата на намотката на статора, се балансира от основната емф E 1, едс на утечка и спада на напрежението върху активното съпротивление на намотката на статора:
В намотка на ротор, подобно уравнение ще изглежда така:
Но тъй като намотката на ротора е затворена, напрежението U 2 =0 и ако вземем предвид също, че E 2s = SE 2 и x 2s = Sx 2, тогава уравнението може да бъде пренаписано като:
![]()
Текущото уравнение за асинхронен двигател повтаря подобно уравнение за трансформатор:
28 Въртящ момент на асинхронен двигател
Въртящият момент в асинхронния двигател се създава от взаимодействието на тока на ротора с магнитното поле на машината. Въртящият момент може да се изрази математически по отношение на електромагнитната мощност на машината:
Където w 1 =2pn 1 /60 - ъглова честота на въртене на полето. на свой ред н 1 =f 1 60/R, Тогава
![]()
Нека заместим във формулата М 1 изразяване РЕм=Pд2/Си разделяйки на 9,81, получаваме:
![]()
Уравнение на въртящия момент на асинхронния двигател
От това следва, че въртящият момент на двигателя е пропорционален на електрическите загуби в ротора. Нека заместим текущата стойност в последната формула аз 2 ’ :
получаваме уравнението за въртящия момент на асинхронен двигател:
Където U 1 - фазово напрежение на намотката на статора.
29 .Механични характеристики на двигателясе нарича зависимостта на скоростта на ротора от въртящия момент на вала n = f (M2). Тъй като при натоварване въртящият момент на празен ход е малък, тогава M2 ≈ M и механични характеристикисе представя чрез зависимостта n = f (M). Ако вземем предвид връзката s = (n1 - n) / n1, тогава механичната характеристика може да се получи чрез представяне на нейната графична зависимост в координати n и M (фиг. 1).

Ориз. 1. Механични характеристики асинхронен двигател
Естествена механична характеристика на асинхронен двигателсъответства на главната (сертификат) верига на неговото свързване и номиналните параметри на захранващото напрежение. Изкуствени характеристикисе получават, ако се включат някакви допълнителни елементи: резистори, реактори, кондензатори. Когато двигателят се захранва с неноминално напрежение, характеристиките също се различават от естествените механични характеристики.
Механичните характеристики са много удобни и полезен инструментпри анализиране на статични и динамични режимиелектрическо задвижване.
30 Механични характеристики и саморегулиране на двигателя. Графиката, свързваща механичните величини - скорост и въртящ момент - се нарича механична характеристика на асинхронен двигател (фиг. 7) n = ƒ(M). Саморегулирането на асинхронен двигател е както следва. Оставете двигателя да работи стабилно в някакъв режим, развивайки скорост n1 и въртящ момент M1. При равномерно въртене този въртящ момент е равен на спирачния момент M t1, т.е. М1=М T 1, n1= конст. Увеличаването на спирачния момент до M2 ще доведе до намаляване на скоростта на машината, тъй като спирачният момент ще стане по-голям от въртящия момент. С намаляването на скоростта приплъзването се увеличава, което от своя страна води до увеличаване на ЕДС и тока в ротора. Това увеличава въртящия момент на двигателя. Този процес завършва, когато въртящият момент M2, развит от двигателя, стане равен на M T 2. В този случай скоростта на въртене е зададена по-ниска от n1. Свойството за автоматично установяване на баланс между спиране и въртящ момент се нарича саморегулация.
На лабораторна маса двигателят се зарежда с електрическа спирачка, състояща се от електромагнит, в пролуката на който се върти диск, монтиран на вала на двигателя. Чрез промяна на напрежението, захранващо електромагнитната намотка с дръжката на автотрансформатора, можете да промените спирачната сила, чийто момент е равен на: M BRAKE = F r (N m)
където F е силата (силата), действаща върху обиколката на макарата, (N);
r е радиусът на ролката, равен на 0,18 м. Нетна мощност на вала на двигателя:
Където н- скорост на въртене на двигателя, об/мин.
където ƒ е мрежовата честота (равна на 50 Hz),
Р- брой двойки полюси на намотката на статора (равен на 2).
n 1 - синхронна скорост на въртящото се магнитно поле.
Скоростта на въртене на двигателя се определя с помощта на тахометър. Приплъзването се изчислява по формулата:
31 Експлоатационни характеристикиНаречен енергийни зависимости, консумирана от двигателя, консумация на ток I, фактор на мощността, скорост на въртене на двигателя, ефективност и въртящ момент M от полезната мощност на двигателя, предадена на вала. Характеристиките на работата определят основните експлоатационни свойства на асинхронния двигател. Експлоатационни характеристики на асинхронен двигател средна мощностпоказано на фиг. 8.8. Тяхното поведение се обяснява по следния начин. При леки натоварвания токът, консумиран от двигателя I (ток на празен ход), може да варира от 20 до 70% от номиналния ток. С увеличаване на натоварването токът в роторната верига се увеличава, което води до почти пропорционално увеличение на тока азвъв веригата на статора.

Фиг.8.8 Въртящ момент на двигателя () също е почти пропорционална на натоварването, но при високи натоварвания линейността на графиката е донякъде нарушена поради намаляване на скоростта на въртене на двигателя. Работната характеристика изразява връзката между мощността, развивана от двигателя, и фазовото изместване между тока на статора и напрежението. Асинхронен двигател, подобно на трансформатор, консумира ток I от мрежата, който е значително извън фазата на приложеното напрежение. Например в неактивен режим. Тъй като натоварването на вала на двигателя се увеличава, активните компоненти на токовете на ротора и статора се увеличават, увеличавайки се . Максималната стойност се достига при .
При по-нататъшно увеличение стойността леко ще намалее. Това се обяснява с увеличаване на приплъзването s, което води до увеличаване на реактивното съпротивление на намотката на ротора и следователно фазовото изместване . СЪСувеличава и, т.е. ще намалее.
Поведение експлоатационни характеристикисе обяснява по следния начин. Стойността на ефективността се определя от съотношението полезна мощносткъм консумираната мощност от мрежата.
Количеството се нарича загуба на мощност. В допълнение към загубите в стоманата на статора и ротора поради обръщане на намагнитването и вихрови токове, които заедно с механичните загуби могат да се считат за постоянни, в асинхронен двигател има загуби в мед ,
тези. в намотките на статора и ротора, които са пропорционални на квадрата на протичащия ток и следователно зависят от товара. По време на работа на празен ход, както в трансформатор, загубите в стоманата преобладават, тъй като a е равно на тока на празен ход, който е малък. При малки натоварвания на вала загубите в мед все още остават малки и следователно ефективността, определена по формулата ![]() (8.5)
(8.5)
с нарастване първо се увеличава рязко. Когато постоянните загуби станат равни на загубите, зависими от товара , ефективност достига максималната си стойност. С по-нататъшно увеличаване на натоварването променливите загуби на мощност се увеличават значително, което води до ефективност. намалява забележимо. Същност на пристрастяването ) може да се обясни от връзката . Ако ефективността беше постоянен, след това между и ще бъде линейна зависимост. Но тъй като ефективността зависи от и тази зависимост първоначално се увеличава рязко и с по-нататъшно увеличаване на натоварването се променя незначително, след това кривата ) Отначало расте бавно, а след това рязко се увеличава.
32 По всяко електрическа веригасумата от мощностите на всички източници на електрическа енергия трябва да бъде равна на сумата от мощностите на всички приемници и спомагателни елементи. След като преди това получихме степенните изрази, можем да ги запишем общ изгледуравнение за баланс на мощността за всяка електрическа верига:
Σ д → аз → + Σ U ← аз → = Σ д ← аз → + Σ U → аз → + Σ аз 2 r.
Уравнение (1.35) може да се напише както за действителните посоки на ЕДС, напрежения и токове, така и за случая, когато някои от тях са произволно избрани положителни посоки. В първия случай всички членове в него ще бъдат положителни и съответните елементи на веригата всъщност ще бъдат източници или приемници на електрическа енергия. Ако някои термини са написани, като се вземат предвид произволно избрани положителни посоки, съответните елементи трябва да се разглеждат като предполагаеми източници и приемници. В резултат на изчисление или анализ някои от тях могат да се окажат отрицателни. Това ще означава, че някои от предполагаемите източници всъщност са приемник, а някои от предполагаемите приемници всъщност са източник.
33 Стартиране на асинхронен двигателсе придружава от преходен процес на машината, свързан с прехода на ротора от състояние на покой към състояние на равномерно въртене, при което въртящият момент на двигателя балансира момента на силите на съпротивление върху вала на машината. При стартиране на асинхронен двигател има повишена консумация на електрическа енергия от захранващата мрежа, която се изразходва не само за преодоляване на спирачния момент, приложен към вала и покриване на загубите в самия асинхронен двигател, но и за придаване на определена кинетична енергия към движещите се части на производствената единица. Следователно при стартиране асинхронният двигател трябва да развие повишен въртящ момент. За асинхронен двигател с навит ротор началният начален въртящ момент, съответстващ на приплъзване sp = 1, зависи от активното съпротивление на регулируемите резистори, въведени в роторната верига.
Ориз. 1. Стартиране на трифазен асинхронен двигател с навит ротор: a - графики на зависимостта на въртящия момент на двигател с навит ротор от приплъзване при различни активни съпротивления на резистори в роторната верига, b - диаграма на включването на резистори и контакти за ускоряване на затваряне в роторната верига. По този начин, при затворени ускорителни контакти U1, U2, т.е. при стартиране на асинхронен двигател с късо съединени контактни пръстени, първоначалният стартов момент Mn1 = (0,5 -1,0) Mnom и началният стартов ток Iп = (4,5 - 7) Inom и още. Нисък начален стартов въртящ момент асинхронен електродвигателс навит ротор може да бъде недостатъчно за задвижване на производствената единица и нейното последващо ускорение, а значителен стартов ток ще доведе до повишено нагряване на намотките на двигателя, което ограничава честотата на включването му и в мрежи с ниска мощност води до временно спад на напрежението, който е нежелан за работата на други приемници. Тези обстоятелства могат да бъдат причината, която изключва използването на асинхронни двигатели с навит ротор с голям пусков ток за задвижване на работни механизми. Въвеждането на регулируеми резистори, наречени пускови резистори, във веригата на ротора на двигателя не само намалява първоначалния пусков ток, но в същото време увеличава началния пусков момент, който може да достигне максималния въртящ момент Mmax (фиг. 1, а, крива 3 ), ако критичното приплъзване на двигателя с навит ротор е skr = (R2" + Rd") / (X1 + X2") = 1, където Rd" е активното съпротивление на резистора, разположен във фазата на ротора на двигателя намотка, намалена до фазата на намотката на статора. По-нататъшното увеличаване на активното съпротивление на стартовия резистор е непрактично, тъй като води до отслабване на първоначалния стартов момент и точката на максимален въртящ момент, влизаща в областта на плъзгане s> 1, което елиминира възможността за ускорение на ротора. Необходимо активно съпротивлениерезистори за стартиране на двигател с навит ротор се определят въз основа на изискванията за стартиране, които могат да бъдат лесни, когато Mn = (0,1 - 0,4) Mn, нормални, ако Mn - (0,5 - 0,75) Mn, и тежки, когато Mn ≥ Mn. За поддържане на достатъчно голям въртящ момент от двигател с навит ротор по време на ускорение на производствена единица, за да се намали продължителността преходен процеси за да се намали нагряването на двигателя, е необходимо постепенно да се намали активното съпротивление на стартовите резистори. Допустимата промяна на въртящия момент по време на ускорение M(t) се определя от електрически и механични условия, които ограничават границата на пиковия въртящ момент M > 0,85 Mmax, момента на превключване M2 > > Ms (фиг. 2), както и ускорението.

Ориз. 2. Пускови характеристики на трифазен асинхронен двигател с навит ротор. Превключването на стартовите резистори се осигурява чрез алтернативно включване на контакторите за ускоряване Y1, Y2, съответно, в моменти t1, t2, отчитани от момента на стартиране на двигателя, когато по време на ускорението въртящият момент M стане равен на момента на превключване M2. Благодарение на това, по време на цялото стартиране, всички пикови моменти са еднакви и всички моменти на превключване са еднакви помежду си. Тъй като въртящият момент и токът на асинхронен двигател с навит ротор са взаимно свързани, възможно е при ускоряване на ротора да се зададе ограничението на пиковия ток I1 = (1,5 - 2,5) Inom и тока на превключване I2, което трябва да осигури момент на превключване M2 > Mc. Изключването на асинхронни двигатели с навит ротор от захранващата мрежа винаги се извършва при късо съединение на роторната верига, за да се избегне появата на пренапрежения във фазите на намотката на статора, които могат да надвишат номиналното напрежение на тези фази с 3 - 4 пъти, ако веригата на ротора е отворена в момента на изключване на двигателя.
34 Регулиране на честотата.Този метод на управление на скоростта позволява използването на най-надеждните и евтини асинхронни двигатели с ротор с катерица. Въпреки това, за да промените честотата на захранващото напрежение, е необходим източник на електрически ток с променлива честота. Като последното, или синхронни генератори с променлива честотавъртене или честотни преобразуватели - електрическа машина или статични, направени върху управлявани полупроводникови вентили (тиристори). В момента честотните преобразуватели имат доста сложна схема и относително висока цена. Бързото развитие на силовите полупроводникови технологии обаче ни позволява да се надяваме на по-нататъшно подобряване на честотните преобразуватели, което отваря перспективи за широко използване на регулиране на честотата. Подробно описание на законите за управление на регулиране на честотатаи анализ на работата на асинхронен двигател при захранване от честотен преобразувател са дадени в § 4.13 и 4.14. Регулиране чрез промяна на броя на полюсите.Това регулиране ви позволява да получите поетапна промяна в скоростта на въртене. На фиг. 4.35 показано най-простата схема(за една фаза), което ви позволява да удвоите броя на полюсите на намотката на статора. За да направите това, всяка фаза на намотката на статора е разделена на две части, които се превключват от последователна връзка към паралелна. От фигурата става ясно, че когато намотки 1-2 и 3-4 са свързани в два успоредни клона, броят на полюсите се намалява наполовина и следователно честотата на въртене на магнитното поле се удвоява.При превключване броят на завъртанията, свързани последователно във всяка фаза, се намалява наполовина, но тъй като скоростта на въртене се удвоява, индуцираната във фазата едс остава непроменена. Следователно, двигателят може да бъде свързан към мрежата със същото напрежение и при двете скорости. За да се избегне превключване в намотката на ротора, последното се извършва късо съединение. Ако трябва да имате три или четири честоти на въртене, тогава на статора се поставя друга намотка, при превключване можете да получите две допълнителни честоти. Наричат се асинхронни двигатели с превключване на броя на полюсите многоскоростна. Регулиране чрез включване на реостат в роторната верига. Когато към роторната верига са свързани допълнителни активни съпротивления Р ext1, Р ext2, Р ext3 и други формата на зависимост се променя M = f(s)и механични характеристики н 2 = f(M)двигател (фиг. 4.37, а). В същото време определен момент на натоварване М n мач фиш с 1 , с 2 , с 3 , ..., по-голямо от подхлъзване с e , когато двигателят работи при естествена характеристика (с Р ext = 0). Следователно оборотите на двигателя в постоянен режим намаляват от н дпреди П 1 П 2 , П 3 ,... (фиг. 4.37, b). Този метод на управление може да се използва само за двигатели с навит ротор. Тя ви позволява плавно да променяте скоростта на въртене в широки граници. Недостатъците му са: а) големи загубиенергия в контролния реостат; б) прекалено „меки“ механични характеристики на двигателя с високо съпротивление във веригата на ротора. В някои случаи последното е неприемливо, тъй като малка промяна в въртящия момент на товара съответства на значителна промяна в скоростта на въртене.
35 Асинхронен генераторе асинхронна електрическа машина (електродвигател), работеща в генераторен режим. С помощта на задвижващ двигател (в нашия случай турбинен двигател) роторът на асинхронен електрически генератор се върти в същата посока като магнитното поле. В този случай приплъзването на ротора става отрицателно, на вала на асинхронната машина се появява спирачен момент и генераторът предава енергия към мрежата. За вълнение електродвижеща силанеговата изходна верига използва остатъчното намагнитване на ротора. За това се използват кондензатори. Асинхронните генератори не са податливи на късо съединение. Асинхронният генератор е по-прост от синхронния (напр автомобилен генератор): ако последният има индуктивни намотки, поставени върху ротора, тогава роторът на асинхронен генератор е подобен на обикновен маховик. Такъв генератор е по-добре защитен от мръсотия и влага и е по-устойчив на късо съединениеи претоварвания, а изходното напрежение на асинхронен електрически генератор има по-ниска степен на нелинейно изкривяване. Това позволява използването на асинхронни генератори не само за захранване на индустриални устройства, които не са критични за формата на входното напрежение, но и за свързване на електронно оборудване. Това е асинхронният електрически генератор идеален източникток за устройства с активен (омичен) товар: електрически нагреватели, заваръчни преобразуватели, лампи с нажежаема жичка, електронни устройства, компютърна и радиотехника. Предимства на асинхронен генератор. Такива предимства включват нисък коефициент на изчистване (коефициент на хармоника), който характеризира количествено присъствиев изходното напрежение на генератора на по-високи хармоници. По-високите хармоници причиняват неравномерно въртене и ненужно нагряване на електродвигателите. Синхронните генератори могат да имат коефициент на изчистване до 15%, а коефициентът на изчистване на асинхронен електрически генератор не надвишава 2%. По този начин асинхронният електрически генератор произвежда почти само полезна енергия. Друго предимство на асинхронния електрически генератор е, че той напълно липсва въртящи се намотки и електронни части, които са чувствителни към външни влияния и доста често са податливи на повреди. Ето защо асинхронен генераторМалко се износва и може да служи много дълго време. Изходът на нашите генератори е незабавно 220/380V AC, който може да се използва директно към домакински уреди (например нагреватели), за зареждане на батерии, за свързване към дъскорезница, а също и за паралелна работа с традиционна мрежа. В този случай ще заплатите разликата между консумираното от мрежата и генерираното от вятърната мелница. защото напрежението отива директно към индустриалните параметри, тогава няма да имате нужда от различни преобразуватели (инвертори), когато свързвате вятърния генератор директно към вашия товар. Например, можете да се свържете директно към дъскорезница и при наличие на вятър да работите така, сякаш просто сте се свързали към 380V мрежа. Както е известно, за намаляване на времето за спиране при спиране на производствени машини и механизми често се използват механични спирачки. Намаляването на времето за спиране, особено при кратък работен цикъл, води до значително увеличаване на производителността на машините и механизмите. Недостатъците на механичните спирачки са бързото износване на триещите се повърхности, сложността и необходимостта от периодично регулиране на спирачната сила и необходимостта от допълнително пространство за поставяне на спирачката и връзката й с механизма. Всички изброени недостатъци се елиминират, ако за тези цели вместо механична спирачка се използват свойствата на електродвигателите да работят в спирачни режими, т.е. по същество работят като генератор и развиват не въртящ се, а спирачен момент. В много подемно-транспортни машини (кранове, асансьори, ескалатори и др.), където е възможно движение под въздействието на гравитацията, се осигурява постоянна, постоянна скорост на спускане на товари с помощта на спирачния момент на електродвигателя. Електрически двигатели постоянен токможе да работи в три спирачни режима:
В режим против превключване;
В генераторен режим с извеждане на енергия към мрежата;
В режим на динамично спиране.
Във всеки от режимите на спиране електродвигателят работи като генератор, преобразувайки например кинетичната енергия на движещи се части или потенциална енергиянизходящо тегло в електрическа енергия.
36 При реверсиране на двигателя по време на движение чрез превключване на превключвателя, двигателят първо се забавя от дадена скорост до нула и след това се ускорява в другата посока. Такова спиране може да се използва и за спиране по време на т.нар антивключване. При такова обръщане или спиране възникват значителни токове в асинхронен двигател с ротор с катерица. Следователно, въз основа на условията на отопление за тези двигатели, броят на обръщанията на час е не повече от десетки. За да се ограничат токовете и да се увеличат въртящите моменти, във веригата на фазовия ротор на асинхронен двигател се въвежда съпротивление. Нека разгледаме три основни метода за електрическо спиране на асинхронни двигатели. Спиране чрез метод на контрапревключване, както беше посочено, той се произвежда, когато двигателят е включен в движение. В този случай магнитното поле се върти в обратна посока спрямо посоката на въртене на двигателя, а въртящият момент на двигателя е спирачен - той действа срещу посоката на въртене. Генераторно спиране възниква, когато многоскоростен двигател се превключи в движение от по-висока скорост към по-ниска, т.е. при превключване на машина от по-малък брой полюси към по-голям. В първия момент на превключване оборотите на двигателя се оказват много по-големи от оборотите на неговото поле, т.е. приплъзването се оказва отрицателно и машината преминава към работа като генератор. Спирането се случва с преобразуването на кинетичната енергия на въртящите се части в електрическа енергия, който минус загубите в машината се изпраща към мрежата. Генераторното спиране може да се използва и при повдигане при спускане на тежък товар, ускоряване на двигателя до скорост, надвишаваща синхронната скорост; тогава машината започва да освобождава в мрежата енергията, предадена й от падащия товар. Спирането в генераторен режим е възможно само при свръхсинхронна скорост. Ако двигателят трябва да бъде спрян в края на спирането, тогава в края на спирането трябва да преминете към механично спиране или друг вид електрическо спиране (динамично, обратно). Ако е необходимо, позицията в края може да бъде осигурена само с помощта на механична спирачка. При динамично спиране Намотката на статора на двигателя е изключена от трифазна мрежаи е свързан към мрежа с постоянен или еднофазен променлив ток. В този случай са възможни различни начини за свързване на фазите на намотката на статора. Намотката на статора, захранвана от постоянен ток, създава стационарно магнитно поле. Точно както при нормална работа на двигателя неговото въртящо се поле дърпа ротора заедно с него, стационарното поле по време на динамично спиране кара ротора бързо да спре. Кинетична енергиявъртящи се части се превръща в топлина, освободена във веригата на ротора поради токове, индуцирани в нея от неподвижното статорно поле. Плавното спиране се осигурява чрез регулиране на напрежението на клемите на статора.Спирачният момент на двигател с навит ротор може да се регулира и от реостат в роторната верига. Недостатъкът на динамичното спиране е, че изисква източник на постоянен ток с ниско напрежение.
37 Синхронна машинае електрическа машина с променлив ток, чиято скорост на ротора е равна на скоростта на въртене на магнитното поле във въздушната междина. Основните части на синхронната машина са котвата и индукторът. Най-често срещаният дизайн е този, при който арматурата е разположена върху статора, а индукторът е разположен върху ротора, отделен от него с въздушна междина. Котвата се състои от една или повече намотки за променлив ток. В двигателите токовете, инжектирани в арматурата, създават въртящо се магнитно поле, което се свързва с полето на индуктора и по този начин се получава преобразуване на енергия. Полето на котвата влияе върху полето на индуктора и затова се нарича също реакционно поле на котвата. В генераторите се създава реакционното поле на котвата променливи токовеиндуциран в намотката на котвата от индуктора. Индукторът се състои от полюси - електромагнити с постоянен ток или постоянни магнити (в микромашини). Индуктори синхронни машиниимам две различни дизайни: изявен полюс или не-изпъкнал полюс. Машината с изпъкнал полюс се отличава с факта, че полюсите са ясно изразени и имат дизайн, подобен на полюсите на машина с постоянен ток. При дизайн с невидими полюси възбуждащата намотка се поставя в жлебовете на сърцевината на индуктора, много подобно на намотката на роторите на асинхронни машини с навит ротор, с единствената разлика, че между полюсите има пространство оставен незапълнен с проводници (т.нар голям зъб). Конструкциите с невидими полюси се използват във високоскоростни машини за намаляване на механичното натоварване върху полюсите. За да се намали магнитното съпротивление, т.е. да се подобри преминаването на магнитния поток, се използват феромагнитни сърцевини на ротора и статора. По принцип те са ламинирана конструкция, изработена от електрическа стомана (т.е. сглобена от отделни листове). Електрическата стомана има редица интересни свойства. Освен всичко друго, той има високо съдържание на силиций, за да увеличи електрическото си съпротивление и по този начин да намали вихровите токове.
Електромагнитните въртящи се сили действат върху полюсите на ротора и статора.
моменти, които са еднакви по големина и насочени в противоположни посоки.
Мощността, необходима за въртене на полюсите на статора при синхронна честота, е
където е ъгловата скорост.
Механичната мощност, развивана от ротора, е

Където  - ъглова скорост на ротора.
- ъглова скорост на ротора.
Разлика в мощността
където R E2 - електрически загуби в намотката на ротора;
m 2 - брой фази на намотката на ротора;
R 2 - активно съпротивление на намотката на ротора;
I 2 - ток на ротора.
където 
Въртящ момент:
 (12.4).
(12.4).
където CT е коефициентът на трансформация на двигател с блокиран ротор,
 - постоянен.
- постоянен.
На фиг. Фигура 12.5 показва зависимостта на електромагнитния момент от приплъзването под формата на плътна линия.

Нека задвижващият механизъм, задвижван от този двигател, създаде противодействащ спирачен момент M2.
На фиг. 12.5 има две точки, за които равенството е вярно M em = M 2
;
това са точките А
И V
.
В точката А
двигателят работи стабилно. Ако двигателят, под влияние на някаква причина, намали скоростта на въртене, тогава неговото приплъзване ще се увеличи, а заедно с това ще се увеличи и въртящият момент. Благодарение на това оборотите на двигателя ще се увеличат и балансът ще се възстанови отново. M em = M 2
;.
В точката V
работата на двигателя не може да бъде стабилна: случайно отклонениескорост на въртене или ще спре двигателя, или ще го накара да достигне точка А
.
Следователно целият възходящ клон на характеристиката е регионът стабилна работадвигател, а цялата долна част е зона на нестабилна работа. Точка b
, съответстващ на максималния въртящ момент, разделя зоните на стабилна и нестабилна работа.
Максималната стойност на въртящия момент съответства на критичното приплъзване S k
. Подхлъзване S=1
съответства на началния въртящ момент. Ако големината на противодействащия спирачен момент М 2
повече от стартовия MP, двигателят няма да стартира при включване и ще остане неподвижен.
Механичната характеристика на асинхронния двигател е зависимостта на скоростта на двигателя от въртящия момент на вала n 2 = f (M 2). Механичната характеристика се получава при условие U 1 - const, f 1 - const. Механичната характеристика на двигателя е зависимостта на въртящия момент от приплъзването, изобразена в различен мащаб. На фиг. Фигура 12.6 показва типична механична характеристика на асинхронен двигател.
С увеличаване на натоварването въртящият момент на вала се увеличава до определена максимална стойност и скоростта на въртене намалява. По правило асинхронният двигател има начален момент, по-малък от максималния. Това се обяснява с факта, че в режим на стартиране, когато n 2 = 0 и S = 1, асинхронният двигател е в режим, подобен на късо съединение в трансформатор. Магнитното поле на ротора е насочено противоположно на магнитното поле на статора.
Полученият или основен магнитен поток във въздушната междина на машината в режим на стартиране, както и ЕДС в статора и ротора E 1 и E 2, са значително намалени. Това води до намаляване на стартовия момент на двигателя и рязко увеличаване на стартовия ток.
12.4. Регулиране скоростта на въртене на асинхронни двигатели.
Реверсиране на асинхронен двигател
От формула (12.2) получаваме
 . (12.11)
. (12.11)
От формула (12.11) става ясно, че скоростта на въртене на асинхронен двигател може да се промени по три начина:
1. промяна на честотата на захранващото напрежение;
2. промяна на броя на полюсите на двигателя. За да направите това, в слотовете на статора се поставя намотка, която може да бъде превключена към различен брой полюси;
3. промяна на приплъзване. Този метод може да се използва в асинхронни двигатели с навит ротор. За да направите това, в роторната верига е включен регулиращ реостат. Увеличаването на активното съпротивление на веригата на ротора води до увеличаване на приплъзването от S a до S g (виж фиг. 12.5) и следователно до намаляване на скоростта на двигателя.
Асинхронните двигатели имат прост дизайни надежден в експлоатация. Недостатъкът на асинхронните двигатели е трудността при регулиране на скоростта им на въртене.
За да обърнете трифазен асинхронен двигател (променете посоката на въртене на двигателя към противоположната), е необходимо да размените две фази, т.е. да размените всеки два линейни проводника, подходящи за намотката на статора на двигателя.
Напрежението U 1, приложено към фазата на намотката на статора, се балансира от основната емф E 1, едс на утечка и спада на напрежението върху активното съпротивление на намотката на статора:
В намотка на ротор, подобно уравнение ще изглежда така:
Но тъй като намотката на ротора е затворена, напрежението U 2 =0 и ако вземем предвид също, че E 2s = SE 2 и x 2s = Sx 2, тогава уравнението може да бъде пренаписано като:
![]()
Текущото уравнение за асинхронен двигател повтаря подобно уравнение за трансформатор:
28 Въртящ момент на асинхронен двигател
Въртящият момент в асинхронния двигател се създава от взаимодействието на тока на ротора с магнитното поле на машината. Въртящият момент може да се изрази математически по отношение на електромагнитната мощност на машината:
Където w 1 =2pn 1 /60 - ъглова честота на въртене на полето. на свой ред н 1 =f 1 60/R, Тогава
![]()
Нека заместим във формулата М 1 изразяване РЕм=Pд2/Си разделяйки на 9,81, получаваме:
![]()
Уравнение на въртящия момент на асинхронния двигател
От това следва, че въртящият момент на двигателя е пропорционален на електрическите загуби в ротора. Нека заместим текущата стойност в последната формула аз 2 ’ :
получаваме уравнението за въртящия момент на асинхронен двигател:
Където U 1 - фазово напрежение на намотката на статора.
29 .Механични характеристики на двигателясе нарича зависимостта на скоростта на ротора от въртящия момент на вала n = f (M2). Тъй като въртящият момент на празен ход е малък при натоварване, M2 ≈ M и механичната характеристика е представена чрез зависимостта n = f (M). Ако вземем предвид връзката s = (n1 - n) / n1, тогава механичната характеристика може да се получи чрез представяне на нейната графична зависимост в координати n и M (фиг. 1).
Ориз. 1. Механични характеристики на асинхронен двигател
Естествена механична характеристика на асинхронен двигателсъответства на главната (сертификат) верига на неговото свързване и номиналните параметри на захранващото напрежение. Изкуствени характеристикисе получават, ако се включат някакви допълнителни елементи: резистори, реактори, кондензатори. Когато двигателят се захранва с неноминално напрежение, характеристиките също се различават от естествените механични характеристики.
Механичните характеристики са много удобен и полезен инструмент за анализ на статичните и динамичните режими на електрическото задвижване.
30 Механични характеристики и саморегулиране на двигателя. Графиката, свързваща механичните величини - скорост и въртящ момент - се нарича механична характеристика на асинхронен двигател (фиг. 7) n = ƒ(M). Саморегулирането на асинхронен двигател е както следва. Оставете двигателя да работи стабилно в някакъв режим, развивайки скорост n1 и въртящ момент M1. При равномерно въртене този въртящ момент е равен на спирачния момент M t1, т.е. М1=М T 1, n1= конст. Увеличаването на спирачния момент до M2 ще доведе до намаляване на скоростта на машината, тъй като спирачният момент ще стане по-голям от въртящия момент. С намаляването на скоростта приплъзването се увеличава, което от своя страна води до увеличаване на ЕДС и тока в ротора. Това увеличава въртящия момент на двигателя. Този процес завършва, когато въртящият момент M2, развит от двигателя, стане равен на M T 2. В този случай скоростта на въртене е зададена по-ниска от n1. Свойството за автоматично установяване на баланс между спиране и въртящ момент се нарича саморегулация.
На лабораторна маса двигателят се зарежда с електрическа спирачка, състояща се от електромагнит, в пролуката на който се върти диск, монтиран на вала на двигателя. Чрез промяна на напрежението, захранващо електромагнитната намотка с дръжката на автотрансформатора, можете да промените спирачната сила, чийто момент е равен на: M BRAKE = F r (N m)
където F е силата (силата), действаща върху обиколката на макарата, (N);
r е радиусът на ролката, равен на 0,18 м. Нетна мощност на вала на двигателя:
Където н- скорост на въртене на двигателя, об/мин.
където ƒ е мрежовата честота (равна на 50 Hz),
Р- брой двойки полюси на намотката на статора (равен на 2).
n 1 - синхронна скорост на въртящото се магнитно поле.
Скоростта на въртене на двигателя се определя с помощта на тахометър. Приплъзването се изчислява по формулата:
31 Експлоатационни характеристикисе наричат зависимостите на консумираната от двигателя мощност, текущата консумация I, фактора на мощността, скоростта на въртене на двигателя, ефективността и въртящия момент M от полезната мощност на двигателя, предадена на вала. Характеристиките на работата определят основните експлоатационни свойства на асинхронния двигател. Характеристиките на работа на асинхронен двигател със средна мощност са показани на фиг. 8.8. Тяхното поведение се обяснява по следния начин. При леки натоварвания токът, консумиран от двигателя I (ток на празен ход), може да варира от 20 до 70% от номиналния ток. С увеличаване на натоварването токът в роторната верига се увеличава, което води до почти пропорционално увеличение на тока азвъв веригата на статора.
Фиг.8.8 Въртящ момент на двигателя () също е почти пропорционална на натоварването, но при високи натоварвания линейността на графиката е донякъде нарушена поради намаляване на скоростта на въртене на двигателя. Работната характеристика изразява връзката между мощността, развивана от двигателя, и фазовото изместване между тока на статора и напрежението. Асинхронен двигател, подобно на трансформатор, консумира ток I от мрежата, който е значително извън фазата на приложеното напрежение. Например в неактивен режим. Тъй като натоварването на вала на двигателя се увеличава, активните компоненти на токовете на ротора и статора се увеличават, увеличавайки се . Максималната стойност се достига при .
При по-нататъшно увеличение стойността леко ще намалее. Това се обяснява с увеличаване на приплъзването s, което води до увеличаване на реактивното съпротивление на намотката на ротора и следователно фазовото изместване . СЪСувеличава и, т.е. ще намалее.
Поведението на работната характеристика се обяснява по следния начин. Стойността на ефективността се определя от съотношението на полезната мощност към мощността, консумирана от мрежата.
Количеството се нарича загуба на мощност. В допълнение към загубите в стоманата на статора и ротора поради обръщане на намагнитването и вихрови токове, които заедно с механичните загуби могат да се считат за постоянни, в асинхронен двигател има загуби в мед ,
тези. в намотките на статора и ротора, които са пропорционални на квадрата на протичащия ток и следователно зависят от товара. По време на работа на празен ход, както в трансформатор, загубите в стоманата преобладават, тъй като a е равно на тока на празен ход, който е малък. При малки натоварвания на вала загубите в мед все още остават малки и следователно ефективността, определена по формулата ![]() (8.5)
(8.5)
с нарастване първо се увеличава рязко. Когато постоянните загуби станат равни на загубите, зависими от товара , ефективност достига максималната си стойност. С по-нататъшно увеличаване на натоварването променливите загуби на мощност се увеличават значително, което води до ефективност. намалява забележимо. Същност на пристрастяването ) може да се обясни от връзката . Ако ефективността беше постоянна, тогава ще има линейна връзка между и. Но тъй като ефективността зависи от и тази зависимост първоначално се увеличава рязко и с по-нататъшно увеличаване на натоварването се променя незначително, след това кривата ) Отначало расте бавно, а след това рязко се увеличава.
32 Във всяка електрическа верига сумата от мощностите на всички източници на електрическа енергия трябва да бъде равна на сумата от мощностите на всички приемници и спомагателни елементи. След като предварително получихме изразите за мощност, можем да напишем в обща форма уравнението за баланс на мощността за всяка електрическа верига:
Σ д → аз → + Σ U ← аз → = Σ д ← аз → + Σ U → аз → + Σ аз 2 r.
Уравнение (1.35) може да се напише както за действителните посоки на ЕДС, напрежения и токове, така и за случая, когато някои от тях са произволно избрани положителни посоки. В първия случай всички членове в него ще бъдат положителни и съответните елементи на веригата всъщност ще бъдат източници или приемници на електрическа енергия. Ако някои термини са написани, като се вземат предвид произволно избрани положителни посоки, съответните елементи трябва да се разглеждат като предполагаеми източници и приемници. В резултат на изчисление или анализ някои от тях могат да се окажат отрицателни. Това ще означава, че някои от предполагаемите източници всъщност са приемник, а някои от предполагаемите приемници всъщност са източник.
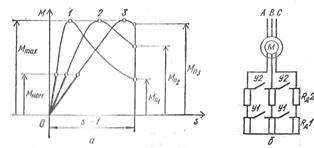
33 Стартиране на асинхронен двигателсе придружава от преходен процес на машината, свързан с прехода на ротора от състояние на покой към състояние на равномерно въртене, при което въртящият момент на двигателя балансира момента на силите на съпротивление върху вала на машината. При стартиране на асинхронен двигател има повишена консумация на електрическа енергия от захранващата мрежа, която се изразходва не само за преодоляване на спирачния момент, приложен към вала и покриване на загубите в самия асинхронен двигател, но и за придаване на определена кинетична енергия към движещите се части на производствената единица. Следователно при стартиране асинхронният двигател трябва да развие повишен въртящ момент. За асинхронен двигател с навит роторначалният начален въртящ момент, съответстващ на приплъзване sp = 1, зависи от активното съпротивление на регулируемите резистори, въведени в роторната верига.
Ориз. 1. Стартиране на трифазен асинхронен двигател с навит ротор: a - графики на зависимостта на въртящия момент на двигател с навит ротор от приплъзване при различни активни съпротивления на резистори в роторната верига, b - диаграма на включването на резистори и контакти за ускоряване на затваряне в роторната верига. По този начин, при затворени ускорителни контакти U1, U2, т.е. при стартиране на асинхронен двигател с късо съединени контактни пръстени, първоначалният стартов момент Mn1 = (0,5 -1,0) Mnom и началният стартов ток Iп = (4,5 - 7) Inom и още. Малък начален пусков момент на асинхронен електродвигател с навит ротор може да бъде недостатъчен за задвижване на производствена единица и последващото му ускорение, а значителен пусков ток ще доведе до повишено нагряване на намотките на двигателя, което ограничава честотата на неговото включване, и в мрежи с ниска мощност води до нежелана работа на други приемници, временен спад на напрежението. Тези обстоятелства могат да бъдат причината, която изключва използването на асинхронни двигатели с навит ротор с голям пусков ток за задвижване на работни механизми. Въвеждането на регулируеми резистори, наречени пускови резистори, във веригата на ротора на двигателя не само намалява първоначалния пусков ток, но в същото време увеличава началния пусков момент, който може да достигне максималния въртящ момент Mmax (фиг. 1, а, крива 3 ), ако критичното приплъзване на двигателя с навит ротор е skr = (R2" + Rd") / (X1 + X2") = 1, където Rd" е активното съпротивление на резистора, разположен във фазата на ротора на двигателя намотка, намалена до фазата на намотката на статора. По-нататъшното увеличаване на активното съпротивление на стартовия резистор е непрактично, тъй като води до отслабване на първоначалния стартов момент и точката на максимален въртящ момент, влизаща в областта на плъзгане s> 1, което елиминира възможността за ускорение на ротора. Необходимото активно съпротивление на резисторите за стартиране на двигател с навит ротор се определя въз основа на изискванията за стартиране, които могат да бъдат лесни, когато Mn = (0,1 - 0,4) Mnom, нормални, ако Mn - (0,5 - 0,75) Mn, и тежки, когато Mn ≥ Mn. За да се поддържа достатъчно голям въртящ момент от двигател с навит ротор по време на ускорението на производствената единица, за да се съкрати продължителността на преходния процес и да се намали нагряването на двигателя, е необходимо постепенно да се намали активното съпротивление на стартовите резистори. Допустимата промяна на въртящия момент по време на ускорение M(t) се определя от електрически и механични условия, които ограничават границата на върховия момент M > 0,85 Mmax, момент на превключване M2 > > Ms (фиг. 2), както и ускорение.
Ориз. 2. Пускови характеристики на трифазен асинхронен двигател с навит ротор. Превключването на стартовите резистори се осигурява чрез алтернативно включване на контакторите за ускоряване Y1, Y2, съответно, в моменти t1, t2, отчитани от момента на стартиране на двигателя, когато по време на ускорението въртящият момент M стане равен на момента на превключване M2. Благодарение на това, по време на цялото стартиране, всички пикови моменти са еднакви и всички моменти на превключване са еднакви помежду си. Тъй като въртящият момент и токът на асинхронен двигател с навит ротор са взаимно свързани, възможно е при ускоряване на ротора да се зададе ограничението на пиковия ток I1 = (1,5 - 2,5) Inom и тока на превключване I2, което трябва да осигури момент на превключване M2 > Mc. Изключването на асинхронни двигатели с навит ротор от захранващата мрежа винаги се извършва при късо съединение на роторната верига, за да се избегне появата на пренапрежения във фазите на намотката на статора, които могат да надвишат номиналното напрежение на тези фази с 3 - 4 пъти, ако веригата на ротора е отворена в момента на изключване на двигателя.
34 Регулиране на честотата.Този метод на управление на скоростта позволява използването на най-надеждните и евтини асинхронни двигатели с ротор с катерица. Въпреки това, за да промените честотата на захранващото напрежение, е необходим източник на електрически ток с променлива честота. Като последните се използват или синхронни генератори с променлива скорост, или честотни преобразуватели - електрически машини или статични, направени върху управлявани полупроводникови вентили (тиристори). В момента честотните преобразуватели имат доста сложна схема и относително висока цена. Бързото развитие на силовите полупроводникови технологии обаче ни позволява да се надяваме на по-нататъшно подобряване на честотните преобразуватели, което отваря перспективи за широко използване на регулиране на честотата. Подробно описание на законите за регулиране на честотата и анализ на работата на асинхронен двигател при захранване от честотен преобразувател са дадени в § 4.13 и 4.14. Регулиране чрез промяна на броя на полюсите.Това регулиране ви позволява да получите поетапна промяна в скоростта на въртене. На фиг. Фигура 4.35 показва най-простата схема (за една фаза), която ви позволява да удвоите броя на полюсите на намотката на статора. За да направите това, всяка фаза на намотката на статора е разделена на две части, които се превключват от последователна връзка към паралелна. От фигурата става ясно, че когато намотки 1-2 и 3-4 са свързани в два успоредни клона, броят на полюсите се намалява наполовина и следователно честотата на въртене на магнитното поле се удвоява.При превключване броят на завъртанията, свързани последователно във всяка фаза, се намалява наполовина, но тъй като скоростта на въртене се удвоява, индуцираната във фазата едс остава непроменена. Следователно, двигателят може да бъде свързан към мрежата със същото напрежение и при двете скорости. За да се избегне превключване в намотката на ротора, последното се извършва късо съединение. Ако трябва да имате три или четири честоти на въртене, тогава на статора се поставя друга намотка, при превключване можете да получите две допълнителни честоти. Наричат се асинхронни двигатели с превключване на броя на полюсите многоскоростна. Регулиране чрез включване на реостат в роторната верига. Когато към роторната верига са свързани допълнителни активни съпротивления Р ext1, Р ext2, Р ext3 и други формата на зависимост се променя M = f(s)и механични характеристики н 2 = f(M)двигател (фиг. 4.37, а). В същото време определен момент на натоварване М n мач фиш с 1 , с 2 , с 3 , ..., по-голямо от подхлъзване с e , когато двигателят работи при естествена характеристика (с Р ext = 0). Следователно оборотите на двигателя в постоянен режим намаляват от н дпреди П 1 П 2 , П 3 ,... (фиг. 4.37, b). Този метод на управление може да се използва само за двигатели с навит ротор. Тя ви позволява плавно да променяте скоростта на въртене в широк диапазон. Недостатъците му са: а) големи загуби на енергия в управляващия реостат; б) прекалено „меки“ механични характеристики на двигателя с високо съпротивление във веригата на ротора. В някои случаи последното е неприемливо, тъй като малка промяна в въртящия момент на товара съответства на значителна промяна в скоростта на въртене.
35 Асинхронен генераторе асинхронна електрическа машина (електродвигател), работеща в генераторен режим. С помощта на задвижващ двигател (в нашия случай турбинен двигател) роторът на асинхронен електрически генератор се върти в същата посока като магнитното поле. В този случай приплъзването на ротора става отрицателно, на вала на асинхронната машина се появява спирачен момент и генераторът предава енергия към мрежата. За възбуждане на електродвижещата сила в изходната му верига се използва остатъчното намагнитване на ротора. За това се използват кондензатори. Асинхронните генератори не са податливи на късо съединение. Асинхронният генератор е проектиран по-просто от синхронния генератор (например автомобилен генератор): ако последният има индуктивни бобини, поставени върху ротора, тогава роторът на асинхронния генератор е подобен на обикновен маховик. Такъв генератор е по-добре защитен от мръсотия и влага, по-устойчив на късо съединение и претоварване, а изходното напрежение на асинхронен електрически генератор има по-ниска степен на нелинейно изкривяване. Това позволява използването на асинхронни генератори не само за захранване на индустриални устройства, които не са критични за формата на входното напрежение, но и за свързване на електронно оборудване. Именно асинхронният електрически генератор е идеалният източник на ток за устройства с активен (омичен) товар: електрически нагреватели, заваръчни преобразуватели, лампи с нажежаема жичка, електронни устройства, компютърна и радиотехника. Предимства на асинхронен генератор . Такива предимства включват нисък фактор на изчистване (коефициент на хармоника), който характеризира количественото наличие на по-високи хармоници в изходното напрежение на генератора. По-високите хармоници причиняват неравномерно въртене и ненужно нагряване на електродвигателите. Синхронните генератори могат да имат коефициент на изчистване до 15%, а коефициентът на изчистване на асинхронен електрически генератор не надвишава 2%. По този начин асинхронният електрически генератор произвежда почти само полезна енергия. Друго предимство на асинхронния електрически генератор е, че той напълно липсва въртящи се намотки и електронни части, които са чувствителни към външни влияния и доста често са податливи на повреди. Следователно асинхронният генератор е подложен на малко износване и може да служи много дълго време. Изходът на нашите генератори е незабавно 220/380V AC, който може да се използва директно към домакински уреди (например нагреватели), за зареждане на батерии, за свързване към дъскорезница, а също и за паралелна работа с традиционна мрежа. В този случай ще заплатите разликата между консумираното от мрежата и генерираното от вятърната мелница. защото напрежението отива директно към индустриалните параметри, тогава няма да имате нужда от различни преобразуватели (инвертори), когато свързвате вятърния генератор директно към вашия товар. Например, можете да се свържете директно към дъскорезница и при наличие на вятър да работите така, сякаш просто сте се свързали към 380V мрежа. Както е известно, за намаляване на времето за спиране при спиране на производствени машини и механизми често се използват механични спирачки. Намаляването на времето за спиране, особено при кратък работен цикъл, води до значително увеличаване на производителността на машините и механизмите. Недостатъците на механичните спирачки са бързото износване на триещите се повърхности, сложността и необходимостта от периодично регулиране на спирачната сила и необходимостта от допълнително пространство за поставяне на спирачката и връзката й с механизма. Всички изброени недостатъци се елиминират, ако за тези цели вместо механична спирачка се използват свойствата на електродвигателите да работят в спирачни режими, т.е. по същество работят като генератор и развиват не въртящ се, а спирачен момент. В много подемно-транспортни машини (кранове, асансьори, ескалатори и др.), където е възможно движение под въздействието на гравитацията, се осигурява постоянна, постоянна скорост на спускане на товари с помощта на спирачния момент на електродвигателя. DC двигателите могат да работят в три спирачни режима:
В режим против превключване;
В генераторен режим с извеждане на енергия към мрежата;
В режим на динамично спиране.
Във всеки от режимите на спиране електрическият мотор работи като генератор, преобразувайки например кинетичната енергия на движещите се части или потенциалната енергия на спускащ се товар в електрическа енергия.
36 При реверсиране на двигателя по време на движение чрез превключване на превключвателя, двигателят първо се забавя от дадена скорост до нула и след това се ускорява в другата посока. Такова спиране може да се използва и за спиране по време на т.нар антивключване. При такова обръщане или спиране възникват значителни токове в асинхронен двигател с ротор с катерица. Следователно, въз основа на условията на отопление за тези двигатели, броят на обръщанията на час е не повече от десетки. За да се ограничат токовете и да се увеличат въртящите моменти, във веригата на фазовия ротор на асинхронен двигател се въвежда съпротивление. Нека разгледаме три основни метода за електрическо спиране на асинхронни двигатели. Спиране чрез метод на контрапревключване, както беше посочено, той се произвежда, когато двигателят е включен в движение. В този случай магнитното поле се върти в обратна посока спрямо посоката на въртене на двигателя, а въртящият момент на двигателя е спирачен - той действа срещу посоката на въртене. Генераторно спиране възниква, когато многоскоростен двигател се превключи в движение от по-висока скорост към по-ниска, т.е. при превключване на машина от по-малък брой полюси към по-голям. В първия момент на превключване оборотите на двигателя се оказват много по-големи от оборотите на неговото поле, т.е. приплъзването се оказва отрицателно и машината преминава към работа като генератор. Спирането възниква с преобразуването на кинетичната енергия на въртящите се части в електрическа енергия, която, минус загубите в машината, се предава в мрежата. Генераторното спиране може да се използва и при повдигане при спускане на тежък товар, ускоряване на двигателя до скорост, надвишаваща синхронната скорост; тогава машината започва да освобождава в мрежата енергията, предадена й от падащия товар. Спирането в генераторен режим е възможно само при свръхсинхронна скорост. Ако двигателят трябва да бъде спрян в края на спирането, тогава в края на спирането трябва да преминете към механично спиране или друг вид електрическо спиране (динамично, обратно). Ако е необходимо, позицията в края може да бъде осигурена само с помощта на механична спирачка. При динамично спиране Намотката на статора на двигателя е изключена от трифазната мрежа и свързана към мрежата с постоянен ток или еднофазна променлив ток. В този случай са възможни различни начини за свързване на фазите на намотката на статора. Намотката на статора, захранвана от постоянен ток, създава стационарно магнитно поле. Точно както при нормална работа на двигателя неговото въртящо се поле дърпа ротора заедно с него, стационарното поле по време на динамично спиране кара ротора бързо да спре. Кинетичната енергия на въртящите се части се превръща в топлина, отделена в роторната верига поради токовете, индуцирани в нея от стационарното статорно поле. Плавното спиране се осигурява чрез регулиране на напрежението на клемите на статора.Спирачният момент на двигател с навит ротор може да се регулира и от реостат в роторната верига. Недостатъкът на динамичното спиране е, че изисква източник на постоянен ток с ниско напрежение.
37 Синхронна машинае електрическа машина с променлив ток, чиято скорост на ротора е равна на скоростта на въртене на магнитното поле във въздушната междина. Основните части на синхронната машина са котвата и индукторът. Най-често срещаният дизайн е този, при който арматурата е разположена върху статора, а индукторът е разположен върху ротора, отделен от него с въздушна междина. Котвата се състои от една или повече намотки за променлив ток. В двигателите токовете, инжектирани в арматурата, създават въртящо се магнитно поле, което се свързва с полето на индуктора и по този начин се получава преобразуване на енергия. Полето на котвата влияе върху полето на индуктора и затова се нарича също реакционно поле на котвата. В генераторите реакционното поле на котвата се създава от променливи токове, индуцирани в намотката на котвата от индуктор. Индукторът се състои от полюси - електромагнити с постоянен ток или постоянни магнити (в микромашини). Индукторите за синхронна машина имат два различни дизайна: с изпъкнал полюс или с неизпъкнал полюс. Машината с изпъкнал полюс се отличава с факта, че полюсите са ясно изразени и имат дизайн, подобен на полюсите на машина с постоянен ток. При дизайн с невидими полюси възбуждащата намотка се поставя в жлебовете на сърцевината на индуктора, много подобно на намотката на роторите на асинхронни машини с навит ротор, с единствената разлика, че между полюсите има пространство оставен незапълнен с проводници (т.нар голям зъб). Конструкциите с невидими полюси се използват във високоскоростни машини за намаляване на механичното натоварване върху полюсите. За да се намали магнитното съпротивление, т.е. да се подобри преминаването на магнитния поток, се използват феромагнитни сърцевини на ротора и статора. По принцип те са ламинирана конструкция, изработена от електрическа стомана (т.е. сглобена от отделни листове). Електрическата стомана има редица интересни свойства. Освен всичко друго, той има високо съдържание на силиций, за да увеличи електрическото си съпротивление и по този начин да намали вихровите токове.
 (1оценки, средно: 5,00от 5)
(1оценки, средно: 5,00от 5) 

