Torsi motor asinkron. Penurunan rumus. Torsi nominal, kritis dan awal
Tindakan Medan gaya per putaran dengan arus memungkinkan Anda menggunakannya untuk menentukan modul induksi magnet. Rotasi kumparan dalam medan magnet menunjukkan bahwa setidaknya ada dua gaya yang bekerja padanya. Resultan gaya-gaya ini akan diterapkan di titik A dan B (Gbr. 6.8). Torsi, yang bekerja pada belokan, akan sama dengan hasil kali salah satu gaya tersebut F per radius putaran R. Momen ini tidak perlu diperhitungkan. Hal ini dapat diukur dengan menggunakan pegas koil atau alat pengukur torsi lainnya yang terhubung ke koil.
Percobaan menunjukkan bahwa suatu kumparan yang diberi arus dalam medan magnet selalu berputar sedemikian rupa sehingga arahnya normal N bertepatan dengan arah induksi magnet bidang yang diteliti B. Jelasnya, dalam hal ini torsinya akan menjadi nol. Ini akan memiliki nilai maksimum ketika sudut antara induksi magnet B dan biasa saja N akan sama dengan 90°.
Induksi magnet dapat ditentukan oleh pengaruh gaya medan magnet pada arus vi dengan arus.
Tanpa mengubah kuat arus dalam konduktor, kita akan mempelajari bagaimana besarnya bergantung torsi maksimum pada parameter koil.
Setelah menempatkan kumparan pada jarak tertentu dari konduktor pembawa arus, kami mengukur torsi maksimum Mmaks untuk nilai arus tertentu dalam satu putaran saya 1. Mari kita gandakan arus pada gilirannya. Pada saya 2 = 2saya 1 momen mekanis maksimum akan sama dengan M maks 2 = 2M maks 1. Kita akan mengamati hal yang sama ketika arus bertambah 3, 4, 5 kali lipat. Dengan demikian, nilai torsi maksimum, yang bekerja pada kumparan dengan arus, adalah sebanding dengan arus pada lilitannya
M maks ~saya vit.
Torsi , yang bekerja pada putaran medan magnet, sebanding dengan kuat arus di dalamnya.Bahan dari situs
Jika kumparan ini diganti dengan kumparan lain yang luasnya lebih besar atau lebih kecil S vit, maka kita akan melihat peningkatan atau penurunan nilai torsi maksimum. Dengan demikian,
torsi maksimum , yang bekerja pada putaran medan magnet, sebanding dengan luasnya:
M maks ~S vit.
Menggabungkan hasil dari kedua tahap penelitian, kami memperoleh
M maks ~saya vit.S vit.
Di halaman ini terdapat materi tentang topik-topik berikut:
Tegangan U 1 yang diterapkan pada fasa belitan stator diimbangi oleh ggl utama E 1 , ggl bocor dan jatuh tegangan pada resistansi aktif belitan stator:
Pada belitan rotor, persamaan serupa akan terlihat seperti:
Namun karena belitan rotor tertutup maka tegangan U 2 =0, dan jika kita juga memperhitungkan bahwa E 2s = SE 2 dan x 2s = Sx 2, maka persamaannya dapat ditulis ulang menjadi:
![]()
Persamaan arus untuk motor asinkron mengulangi persamaan serupa untuk transformator:
28 Torsi motor asinkron
Torsi pada motor asinkron dihasilkan oleh interaksi arus rotor dengan medan magnet mesin. Torsi dapat dinyatakan secara matematis dalam bentuk daya elektromagnetik mesin:
Di mana w 1 =2pn 1 /60 - frekuensi sudut rotasi bidang. Pada gilirannya, N 1 =f 1 60/R, Kemudian
![]()
Mari kita substitusikan ke dalam rumus M 1 ekspresi REm=Pe2/S dan membaginya dengan 9,81, kita mendapatkan:
![]()
Persamaan Torsi Motor Induksi
Oleh karena itu torsi motor sebanding dengan rugi-rugi listrik pada rotor. Mari kita substitusikan nilai saat ini ke dalam rumus terakhir SAYA 2 ’ :
kita memperoleh persamaan torsi motor asinkron:
Di mana kamu 1 - tegangan fasa belitan stator.
29 .Karakteristik mekanis mesin disebut ketergantungan kecepatan rotor terhadap torsi pada poros n = f (M2). Karena torsi tanpa beban di bawah beban kecil, maka M2 ≈ M dan karakteristik mekanis diwakili oleh ketergantungan n = f (M). Jika kita memperhitungkan hubungan s = (n1 - n) / n1, maka karakteristik mekanik dapat diperoleh dengan merepresentasikan ketergantungan grafisnya pada koordinat n dan M (Gbr. 1).

Beras. 1. Karakteristik mekanis motor asinkron
Karakteristik mekanik alami motor induksi sesuai dengan sirkuit utama (sertifikat) koneksinya dan parameter nominal tegangan suplai. Karakteristik buatan diperoleh jika ada elemen tambahan yang disertakan: resistor, reaktor, kapasitor. Ketika motor ditenagai dengan tegangan non-rata, karakteristiknya juga berbeda dari karakteristik mekanis alami.
Karakteristik mekanisnya sangat nyaman dan alat yang berguna saat menganalisis statis dan mode dinamis penggerak listrik.
30 Karakteristik mekanis dan pengaturan mandiri mesin. Grafik yang menghubungkan besaran mekanik - kecepatan dan torsi - disebut karakteristik mekanik motor asinkron (Gbr. 7) n = ƒ(M). Pengaturan mandiri motor asinkron adalah sebagai berikut. Biarkan mesin beroperasi secara stabil dalam mode tertentu, mengembangkan kecepatan n1 dan torsi M1. Dengan putaran seragam, torsi ini sama dengan torsi pengereman M t1, yaitu. M1=M T 1, n1= aset. Peningkatan torsi pengereman hingga M2 akan menyebabkan penurunan kecepatan alat berat, karena torsi pengereman akan menjadi lebih besar dibandingkan torsi. Ketika kecepatan menurun, slip meningkat, yang pada gilirannya menyebabkan peningkatan ggl dan arus pada rotor. Hal ini meningkatkan torsi mesin. Proses ini berakhir ketika torsi M2 yang dikembangkan mesin menjadi sama dengan M T 2. Dalam hal ini, kecepatan putaran diatur lebih rendah dari n1. Sifat yang secara otomatis menciptakan keseimbangan antara pengereman dan torsi disebut regulasi diri.
Di bangku laboratorium, mesin diisi dengan rem listrik, yang terdiri dari elektromagnet, di celahnya piringan yang dipasang pada poros mesin berputar. Dengan mengubah tegangan suplai kumparan elektromagnet dengan pegangan autotransformator, gaya pengereman dapat diubah, momennya sama dengan: M BRAKE = F r (N m)
dimana F adalah gaya (gaya) yang bekerja pada keliling katrol, (N);
r adalah jari-jari katrol sama dengan 0,18 m Daya bersih pada poros motor:
Di mana N- kecepatan putaran mesin, rpm.
di mana ƒ adalah frekuensi jaringan (sama dengan 50 Hz),
R- jumlah pasang kutub belitan stator (sama dengan 2).
n 1 - kecepatan sinkron dari medan magnet yang berputar.
Kecepatan putaran mesin ditentukan dengan menggunakan tachometer. Slip dihitung menggunakan rumus:
31 Karakteristik kinerja ditelepon ketergantungan daya, dikonsumsi oleh mesin, konsumsi arus I, faktor daya, kecepatan putaran mesin, efisiensi dan torsi M dari tenaga mesin berguna yang disalurkan ke poros. Karakteristik kinerja menentukan sifat operasional dasar motor asinkron. Karakteristik kinerja motor asinkron kekuatan sedang ditunjukkan pada Gambar. 8.8. Perilaku mereka dijelaskan sebagai berikut. Pada beban ringan, arus yang dikonsumsi oleh motor I (arus tanpa beban) dapat berkisar antara 20 hingga 70% dari arus pengenal. Ketika beban meningkat, arus dalam rangkaian rotor meningkat, yang menyebabkan peningkatan arus yang hampir sebanding SAYA pada rangkaian stator.

Gambar.8.8 Torsi motor () juga hampir sebanding dengan beban, namun pada beban tinggi linearitas grafiknya agak terganggu akibat penurunan kecepatan putaran mesin. Karakteristik kinerja menyatakan hubungan antara daya yang dikembangkan oleh motor dan pergeseran fasa antara arus dan tegangan stator. Motor asinkron, seperti transformator, mengkonsumsi arus I dari jaringan, yang jauh berbeda fasa dengan tegangan yang diberikan. Misalnya saja dalam mode siaga. Dengan bertambahnya beban pada poros motor, arus komponen aktif rotor dan stator semakin meningkat . Nilai maksimum dicapai pada .
Dengan peningkatan lebih lanjut, nilainya akan sedikit menurun. Hal ini dijelaskan oleh peningkatan slip s, yang menyebabkan peningkatan reaktansi belitan rotor, dan akibatnya, pergeseran fasa. . DENGAN meningkat dan, yaitu. akan berkurang.
Perilaku karakteristik kinerja dijelaskan sebagai berikut. Nilai efisiensi ditentukan oleh rasio kekuatan yang berguna dengan daya yang dikonsumsi dari jaringan.
Besarannya disebut rugi-rugi daya. Selain rugi-rugi pada stator dan rotor baja akibat pembalikan magnetisasi dan arus eddy, yang bersama-sama dengan rugi-rugi mekanis dapat dianggap konstan, pada motor asinkron juga terdapat rugi-rugi tembaga. ,
itu. pada belitan stator dan rotor, yang sebanding dengan kuadrat arus yang mengalir dan, oleh karena itu, bergantung pada beban. Selama operasi tanpa beban, seperti pada transformator, rugi-rugi pada baja mendominasi, karena a sama dengan arus tanpa beban, yang kecil. Pada beban kecil pada poros, kerugian tembaga masih tetap kecil, dan oleh karena itu efisiensinya ditentukan oleh rumus ![]() (8.5)
(8.5)
dengan peningkatan, pertama-tama meningkat tajam. Ketika rugi-rugi konstan menjadi sama dengan rugi-rugi yang bergantung pada beban , efisiensi mencapai nilai maksimalnya. Dengan peningkatan beban lebih lanjut, kehilangan daya variabel meningkat secara signifikan, sehingga menghasilkan efisiensi. berkurang secara nyata. Sifat kecanduan ) dapat dijelaskan dari hubungannya . Jika efisiensi adalah konstan, maka antara dan akan menjadi ketergantungan linier. Tapi karena efisiensinya bergantung pada dan ketergantungan ini pada awalnya meningkat tajam, dan dengan peningkatan beban lebih lanjut, perubahannya tidak signifikan, kemudian kurva ) Mula-mula pertumbuhannya lambat dan kemudian meningkat tajam.
32 Apapun rangkaian listrik jumlah daya semua sumber energi listrik harus sama dengan jumlah daya semua penerima dan elemen bantu. Setelah sebelumnya memperoleh ekspresi pangkat, kita dapat menuliskannya pandangan umum persamaan keseimbangan daya untuk setiap rangkaian listrik:
Σ E → SAYA → + Σ kamu ← SAYA → = Σ E ← SAYA → + Σ kamu → SAYA → + Σ SAYA 2 R.
Persamaan (1.35) dapat ditulis baik untuk arah ggl, tegangan, dan arus sebenarnya, dan untuk kasus ketika beberapa di antaranya dipilih secara sewenang-wenang dalam arah positif. Dalam kasus pertama, semua suku di dalamnya akan positif dan elemen rangkaian yang bersangkutan sebenarnya akan menjadi sumber atau penerima energi listrik. Jika beberapa istilah ditulis dengan mempertimbangkan arah positif yang dipilih secara sewenang-wenang, elemen-elemen yang terkait harus dianggap sebagai sumber dan penerima yang diduga. Sebagai hasil perhitungan atau analisis, beberapa di antaranya mungkin berubah menjadi negatif. Ini berarti bahwa beberapa sumber yang dianggap sebenarnya adalah penerima, dan beberapa penerima yang dianggap sebenarnya adalah sumber.
33 Memulai motor asinkron disertai dengan proses transien mesin yang berhubungan dengan peralihan rotor dari keadaan diam ke keadaan putaran seragam, dimana torsi mesin menyeimbangkan momen gaya hambatan pada poros mesin. Saat menghidupkan motor asinkron, terjadi peningkatan konsumsi energi listrik dari jaringan suplai, yang dihabiskan tidak hanya untuk mengatasi torsi pengereman yang diterapkan pada poros dan menutupi kerugian pada motor asinkron itu sendiri, tetapi juga untuk memberikan energi kinetik tertentu. ke bagian bergerak dari unit produksi. Oleh karena itu, saat start, motor asinkron harus mengembangkan torsi yang meningkat. Untuk motor asinkron dengan rotor luka torsi awal awal yang sesuai dengan slip sp = 1 bergantung pada resistansi aktif dari resistor yang dapat disesuaikan yang dimasukkan ke dalam rangkaian rotor.
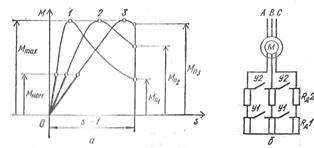
Beras. 1. Menghidupkan motor asinkron tiga fasa dengan rotor belitan: a - grafik ketergantungan torsi motor dengan rotor belitan terhadap slip pada berbagai resistansi aktif resistor pada rangkaian rotor, b - diagram pengaktifan resistor dan menutup kontak percepatan pada rangkaian rotor. Jadi, dengan kontak percepatan tertutup U1, U2, yaitu pada saat menstart motor asinkron dengan slip ring hubung singkat, torsi awal awal Mn1 = (0,5 -1,0) Mnom, dan arus awal awal Iп = (4,5 - 7) Inom dan banyak lagi. Torsi awal awal yang rendah motor listrik asinkron dengan rotor yang digulung mungkin tidak cukup untuk menggerakkan unit produksi dan percepatan selanjutnya, dan arus awal yang signifikan akan menyebabkan peningkatan pemanasan belitan motor, yang membatasi frekuensi penyalaannya, dan dalam jaringan berdaya rendah menyebabkan sementara penurunan tegangan yang tidak diinginkan untuk pengoperasian penerima lainnya. Keadaan ini mungkin menjadi alasan yang menghalangi penggunaan motor asinkron dengan rotor belitan dengan arus awal yang besar untuk menggerakkan mekanisme operasi. Pengenalan resistor yang dapat disesuaikan, yang disebut resistor awal, ke dalam rangkaian rotor motor tidak hanya mengurangi arus awal awal, tetapi pada saat yang sama meningkatkan torsi awal awal, yang dapat mencapai torsi maksimum Mmax (Gbr. 1, a, kurva 3 ), jika slip kritis motor rotor belitan adalah skr = (R2" + Rd") / (X1 + X2") = 1, dimana Rd" adalah resistansi aktif resistor yang terletak pada fasa rotor motor belitan, direduksi menjadi fase belitan stator. Peningkatan lebih lanjut dalam resistansi aktif resistor awal tidak praktis, karena hal ini menyebabkan melemahnya torsi awal awal dan titik torsi maksimum memasuki daerah geser s > 1, yang menghilangkan kemungkinan percepatan rotor. Diperlukan resistensi aktif resistor untuk menstart motor rotor belitan ditentukan berdasarkan kebutuhan start, yaitu mudah jika Mn = (0,1 - 0,4) Mn, normal jika Mn - (0,5 - 0,75) Mn, dan parah jika Mn ≥ Mn. Untuk mempertahankan torsi yang cukup besar oleh motor rotor belitan selama akselerasi unit produksi guna mengurangi durasi proses transisi dan untuk mengurangi pemanasan mesin, perlu untuk secara bertahap mengurangi resistansi aktif dari resistor awal. Perubahan torsi yang diijinkan selama akselerasi M(t) ditentukan oleh kondisi kelistrikan dan mekanik yang membatasi batas torsi puncak M > 0,85 Mmaks, momen peralihan M2 > > Ms (Gbr. 2), serta percepatan.

Beras. 2. Karakteristik pengasutan motor asinkron tiga fasa dengan rotor belitan. Peralihan resistor start dilakukan dengan menyalakan secara bergantian kontaktor percepatan Y1, Y2, masing-masing, pada waktu t1, t2 dihitung sejak mesin dihidupkan, ketika selama akselerasi torsi M menjadi sama dengan momen peralihan M2. Berkat ini, sepanjang start-up, semua momen puncak adalah sama dan semua momen peralihan sama satu sama lain. Karena torsi dan arus motor asinkron dengan rotor belitan saling berhubungan, maka ketika mempercepat rotor, dimungkinkan untuk mengatur batas arus puncak I1 = (1,5 - 2,5) Inom dan arus switching I2, yang harus memastikan momen peralihan M2 > Mc. Pemutusan motor asinkron dengan rotor belitan dari jaringan suplai selalu dilakukan dengan rangkaian rotor dihubung pendek, untuk menghindari terjadinya tegangan lebih pada fasa-fasa belitan stator, yang dapat melebihi tegangan pengenal fasa-fasa tersebut sebesar 3 - 4 kali jika rangkaian rotor terbuka pada saat mesin dimatikan.
34 Regulasi frekuensi. Metode kontrol kecepatan ini memungkinkan penggunaan motor asinkron yang paling andal dan termurah dengan rotor sangkar tupai. Namun untuk mengubah frekuensi tegangan suplai diperlukan sumber arus listrik dengan frekuensi yang bervariasi. Sebagai yang terakhir, baik generator sinkron dengan frekuensi variabel rotasi, atau konverter frekuensi - mesin listrik atau statis, dibuat pada katup semikonduktor yang dikontrol (thyristor). Saat ini konverter frekuensi memiliki rangkaian yang agak rumit dan biaya yang relatif mahal. Namun, pesatnya perkembangan teknologi semikonduktor daya memberikan harapan untuk peningkatan lebih lanjut pada konverter frekuensi, yang membuka prospek meluasnya penggunaan pengaturan frekuensi. Penjelasan rinci tentang hukum kontrol untuk pengaturan frekuensi dan analisis pengoperasian motor asinkron ketika ditenagai oleh konverter frekuensi diberikan dalam § 4.13 dan 4.14. Regulasi dengan mengubah jumlah tiang. Peraturan ini memungkinkan Anda memperoleh perubahan bertahap dalam kecepatan putaran. Pada Gambar. 4.35 ditampilkan skema paling sederhana(untuk satu fase), memungkinkan Anda menggandakan jumlah kutub belitan stator. Untuk melakukan ini, setiap fase belitan stator dibagi menjadi dua bagian, yang dialihkan dari sambungan seri ke sambungan paralel. Dari gambar tersebut jelas bahwa ketika kumparan 1-2 dan 3-4 dihubungkan menjadi dua cabang paralel, jumlah kutub menjadi setengahnya, sehingga frekuensi putaran medan magnet menjadi dua kali lipat. Saat berpindah, jumlah belitan yang dihubungkan secara seri di setiap fasa menjadi setengahnya, tetapi karena kecepatan putarannya berlipat ganda, ggl yang diinduksi dalam fasa tetap tidak berubah. Akibatnya, motor dapat dihubungkan ke jaringan dengan tegangan yang sama pada kedua kecepatan. Untuk menghindari peralihan pada belitan rotor, yang terakhir dilakukan hubung singkat. Jika Anda perlu memiliki tiga atau empat frekuensi putaran, maka belitan lain ditempatkan pada stator, ketika dialihkan, Anda bisa mendapatkan dua frekuensi tambahan. Motor asinkron dengan perpindahan jumlah kutub disebut multi-kecepatan. Regulasi dengan memasukkan rheostat pada rangkaian rotor. Ketika resistansi aktif tambahan dihubungkan ke rangkaian rotor R ext1, R ext2, R ext3 dan lain-lain bentuk ketergantungan berubah M = f(s) dan karakteristik mekanis N 2 = f(M) mesin (Gbr. 4.37, a). Pada saat yang sama, momen beban tertentu M n slip pertandingan S 1 , S 2 , S 3 , ..., lebih besar dari tergelincir S e , ketika mesin beroperasi pada karakteristik alami (dengan R ekst = 0). Akibatnya, kecepatan mesin pada kondisi tunak menurun N e sebelum P 1 P 2 , P 3 ,... (Gbr. 4.37, b). Metode pengendalian ini hanya dapat digunakan untuk motor rotor belitan. Ini memungkinkan Anda mengubah kecepatan putaran dengan lancar dalam batas yang luas. Kerugiannya adalah: a) kerugian besar energi dalam rheostat kendali; b) karakteristik mekanis mesin yang terlalu “lunak” dengan resistansi tinggi pada rangkaian rotor. Dalam beberapa kasus, hal terakhir ini tidak dapat diterima, karena perubahan kecil pada torsi beban berhubungan dengan perubahan signifikan pada kecepatan putaran.
35 Generator asinkron adalah mesin listrik asinkron (motor listrik) yang beroperasi dalam mode generator. Dengan bantuan motor penggerak (dalam kasus kami, mesin turbin), rotor generator listrik asinkron berputar searah dengan medan magnet. Dalam hal ini, slip rotor menjadi negatif, torsi pengereman muncul pada poros mesin asinkron, dan generator mentransfer energi ke jaringan. Untuk kegembiraan gaya gerak listrik rangkaian keluarannya menggunakan sisa magnetisasi rotor. Kapasitor digunakan untuk ini. Generator asinkron tidak rentan terhadap korsleting. Generator asinkron lebih sederhana daripada generator sinkron (misalnya generator mobil): jika yang terakhir memiliki kumparan induktif yang ditempatkan pada rotor, maka rotor generator asinkron mirip dengan roda gila biasa. Generator seperti itu lebih terlindungi dari kotoran dan kelembapan, serta lebih tahan terhadap hubungan pendek dan kelebihan beban, dan tegangan keluaran generator listrik asinkron memiliki tingkat distorsi nonlinier yang lebih rendah. Hal ini memungkinkan penggunaan generator asinkron tidak hanya untuk memberi daya pada perangkat industri yang tidak penting bagi bentuk tegangan input, tetapi juga untuk menghubungkan peralatan elektronik. Ini adalah generator listrik asinkron sumber ideal arus untuk perangkat dengan beban aktif (ohmik): pemanas listrik, konverter las, lampu pijar, perangkat elektronik, teknik komputer dan radio. Keuntungan dari generator asinkron. Keuntungan tersebut termasuk faktor kliring yang rendah (koefisien harmonik), yang menjadi ciri khasnya kehadiran kuantitatif pada tegangan keluaran generator harmonik yang lebih tinggi. Harmonisa yang lebih tinggi menyebabkan putaran yang tidak merata dan pemanasan motor listrik yang tidak perlu. Generator sinkron dapat memiliki faktor kliring hingga 15%, dan faktor kliring generator listrik asinkron tidak melebihi 2%. Jadi, generator listrik asinkron hampir hanya menghasilkan energi yang berguna. Keuntungan lain dari generator listrik asinkron adalah tidak adanya belitan berputar dan komponen elektronik yang sensitif terhadap pengaruh luar dan seringkali rentan terhadap kerusakan. Itu sebabnya generator asinkron Ini tidak mudah dipakai dan dapat digunakan untuk waktu yang sangat lama. Output dari generator kami langsung 220/380V AC, yang dapat digunakan langsung ke peralatan rumah tangga (misalnya pemanas), untuk mengisi baterai, untuk dihubungkan ke penggergajian kayu, dan juga untuk pengoperasian paralel dengan jaringan tradisional. Dalam hal ini, Anda akan membayar selisih antara apa yang dikonsumsi dari jaringan dan apa yang dihasilkan oleh kincir angin. Karena tegangan langsung menuju parameter industri, maka Anda tidak memerlukan berbagai konverter (inverter) saat menghubungkan generator angin langsung ke beban Anda. Misalnya, Anda dapat langsung menyambung ke pabrik penggergajian kayu dan, jika ada angin, bekerja seolah-olah Anda baru saja tersambung ke jaringan 380V. Seperti diketahui, untuk mengurangi waktu pengereman saat menghentikan mesin dan mekanisme produksi, sering digunakan rem mekanis. Mengurangi waktu pengereman, terutama dalam kasus siklus pengoperasian yang pendek, menghasilkan peningkatan yang signifikan pada produktivitas alat berat dan mekanisme. Kerugian dari rem mekanis adalah cepatnya keausan permukaan gesekan, kerumitan dan kebutuhan penyesuaian gaya pengereman secara berkala, serta kebutuhan ruang tambahan untuk menampung rem dan sambungannya ke mekanisme. Semua kerugian di atas dihilangkan jika, untuk tujuan ini, alih-alih rem mekanis, sifat motor listrik digunakan untuk beroperasi dalam mode pengereman, yaitu, pada dasarnya bekerja sebagai generator dan tidak mengembangkan putaran, tetapi torsi pengereman. Di banyak mesin pengangkat dan pengangkut (derek, elevator, eskalator, dll.), di mana pergerakan di bawah pengaruh gravitasi dimungkinkan, kecepatan penurunan beban yang konstan dan stabil dipastikan dengan menggunakan torsi pengereman motor listrik. Motor listrik arus searah dapat beroperasi dalam tiga mode pengereman:
Dalam mode anti-saklar;
Dalam mode generator dengan keluaran energi ke jaringan;
Dalam mode pengereman dinamis.
Dalam mode pengereman mana pun, motor listrik beroperasi sebagai generator, misalnya mengubah energi kinetik bagian yang bergerak atau energi potensial penurunan berat badan menjadi energi listrik.
36 Saat memundurkan mesin sambil bergerak dengan mengganti saklar, mesin pertama-tama diperlambat dari kecepatan tertentu ke nol, dan kemudian dipercepat ke arah lain. Pengereman seperti itu juga dapat digunakan untuk pengereman selama apa yang disebut anti-inklusi. Dengan pembalikan atau pengereman seperti itu, arus yang signifikan terjadi pada motor asinkron dengan rotor sangkar-tupai. Oleh karena itu, berdasarkan kondisi pemanasan mesin tersebut, jumlah putaran per jam tidak lebih dari puluhan. Untuk membatasi arus dan meningkatkan torsi, resistansi dimasukkan ke dalam rangkaian rotor fase motor asinkron. Mari kita pertimbangkan tiga metode utama pengereman listrik motor asinkron. Pengereman dengan metode counter-switching, seperti yang disebutkan, ini dihasilkan saat mesin dihidupkan saat bepergian. Dalam hal ini, medan magnet berputar ke arah yang berlawanan dengan arah putaran mesin, dan torsi mesin yang direm berlawanan dengan arah putaran. Pengereman genset terjadi ketika mesin multi-kecepatan dialihkan dari kecepatan yang lebih tinggi ke kecepatan yang lebih rendah, mis. ketika mengganti mesin dari jumlah kutub yang lebih kecil ke kutub yang lebih besar. Pada saat peralihan pertama, kecepatan mesin ternyata jauh lebih besar daripada kecepatan medannya, yaitu slip menjadi negatif dan mesin beralih beroperasi sebagai generator. Pengereman terjadi dengan konversi energi kinetik bagian yang berputar menjadi energi listrik, yang dikurangi kerugian pada mesin, dikirim ke jaringan. Pengereman generator juga dapat digunakan pada pengangkatan saat menurunkan beban berat, mempercepat mesin hingga kecepatan melebihi kecepatan sinkron; kemudian mesin mulai melepaskan ke dalam jaringan energi yang diberikan kepadanya oleh beban yang menurun. Pengereman dalam mode pengoperasian generator hanya dapat dilakukan pada kecepatan supersinkron. Jika mesin harus dimatikan pada akhir pengereman, maka pada akhir pengereman sebaiknya beralih ke pengereman mekanis atau jenis pengereman elektrik lainnya (dinamis, back-on). Jika perlu, posisi di ujung hanya bisa diamankan menggunakan rem mekanis. Pada pengereman dinamis Belitan stator motor terputus jaringan tiga fase dan terhubung ke jaringan arus bolak-balik satu fasa atau searah. Dalam hal ini, berbagai cara untuk menghubungkan fase belitan stator dimungkinkan. Belitan stator, ditenagai oleh arus searah, menciptakan medan magnet stasioner. Sama seperti saat mesin beroperasi normal, medan putarnya menyeret rotor bersamanya, medan stasioner saat pengereman dinamis menyebabkan rotor berhenti dengan cepat. Energi kinetik bagian yang berputar berubah menjadi panas yang dilepaskan dalam rangkaian rotor karena arus yang diinduksi di dalamnya oleh medan stator stasioner. Pengereman yang mulus dipastikan dengan mengatur tegangan pada terminal stator.Torsi pengereman motor dengan rotor belitan juga dapat diatur oleh rheostat pada rangkaian rotor. Kerugian dari pengereman dinamis adalah memerlukan sumber DC tegangan rendah.
37 Mesin sinkron adalah mesin listrik arus bolak-balik yang kecepatan rotornya sama dengan kecepatan putaran medan magnet di celah udara. Bagian utama mesin sinkron adalah jangkar dan induktor. Desain yang paling umum adalah desain di mana jangkar terletak di stator, dan induktor terletak di rotor yang dipisahkan oleh celah udara. Angker terdiri dari satu atau lebih belitan arus bolak-balik. Pada motor, arus yang disuntikkan ke jangkar menciptakan medan magnet berputar, yang menyatu dengan medan induktor dan dengan demikian terjadi konversi energi. Medan jangkar mempengaruhi medan induktor dan oleh karena itu disebut juga medan reaksi jangkar. Di generator, medan reaksi jangkar dibuat arus bolak-balik diinduksikan pada belitan jangkar dari induktor. Induktor terdiri dari kutub - elektromagnet arus searah atau magnet permanen (dalam mesin mikro). Induktor mesin sinkron punya dua berbagai desain: kutub menonjol atau kutub tidak menonjol. Mesin kutub menonjol dibedakan oleh fakta bahwa kutub-kutubnya diucapkan dan memiliki desain yang mirip dengan kutub-kutub mesin DC. Dengan desain kutub tidak menonjol, belitan eksitasi ditempatkan pada alur inti induktor, sangat mirip dengan belitan rotor mesin asinkron dengan rotor belitan, yang membedakan hanyalah terdapat ruang antar kutub. dibiarkan tidak terisi dengan konduktor (yang disebut gigi besar). Desain tiang tidak menonjol digunakan pada mesin berkecepatan tinggi untuk mengurangi beban mekanis pada tiang. Untuk mengurangi hambatan magnet, yaitu untuk meningkatkan aliran fluks magnet, digunakan inti feromagnetik dari rotor dan stator. Pada dasarnya, mereka adalah struktur laminasi yang terbuat dari baja listrik (yaitu, dirakit dari lembaran terpisah). Baja listrik memiliki sejumlah properti yang menarik. Antara lain memiliki kandungan silikon yang tinggi untuk meningkatkan hambatan listrik sehingga mengurangi arus eddy.
Gaya putar elektromagnetik bekerja pada kutub rotor dan stator.
momen yang besarnya sama dan arahnya berlawanan.
Daya yang diperlukan untuk memutar kutub stator pada frekuensi sinkron adalah
dimana adalah kecepatan sudut.
Tenaga mekanik yang dikembangkan oleh rotor adalah

Di mana  - kecepatan sudut rotor.
- kecepatan sudut rotor.
Perbedaan kekuatan
dimana R E2 - rugi-rugi listrik pada belitan rotor;
m 2 - jumlah fase belitan rotor;
R 2 - resistansi aktif belitan rotor;
Saya 2 - arus rotor.
Di mana 
torsi:
 (12.4).
(12.4).
dimana CT adalah rasio transformasi mesin dengan rotor terkunci,
 - konstan.
- konstan.
Pada Gambar. Gambar 12.5 menunjukkan ketergantungan torsi elektromagnetik pada slip dalam bentuk garis padat.

Biarkan aktuator yang digerakkan oleh mesin ini menciptakan torsi pengereman M2.
Pada Gambar 12.5 ada dua titik yang persamaannya benar M em = M 2
;
inilah titik-titiknya A
Dan V
.
Pada intinya A
mesin bekerja dengan stabil. Jika mesin, di bawah pengaruh suatu alasan, mengurangi kecepatan putaran, maka slipnya akan meningkat, dan seiring dengan itu torsi juga akan meningkat. Berkat ini, kecepatan mesin akan meningkat dan keseimbangan akan pulih kembali. M em = M 2
;.
Pada intinya V
pengoperasian mesin tidak bisa stabil: penyimpangan acak kecepatan putaran akan menghentikan mesin atau menyebabkannya mencapai suatu titik A
.
Akibatnya, seluruh cabang karakteristik yang menaik adalah wilayah operasi yang stabil mesin, dan seluruh bagian hilir merupakan area pengoperasian yang tidak stabil. Dot B
, sesuai dengan torsi maksimum, memisahkan area operasi stabil dan tidak stabil.
Nilai torsi maksimum sesuai dengan slip kritis S k
. Tergelincir S=1
sesuai dengan torsi awal. Jika besarnya menangkal torsi pengereman M 2
lebih dari MP awal, mesin tidak akan hidup saat dihidupkan dan tidak bergerak.
Sifat mekanik motor asinkron adalah ketergantungan kecepatan motor terhadap torsi pada poros n 2 = f (M 2). Karakteristik mekanik diperoleh pada kondisi U 1 - const, f 1 - const. Karakteristik mekanis mesin adalah ketergantungan torsi pada slip, diplot pada skala yang berbeda. Pada Gambar. Gambar 12.6 menunjukkan karakteristik mekanis khas motor asinkron.
Dengan bertambahnya beban, torsi pada poros meningkat hingga nilai maksimum tertentu, dan kecepatan putaran menurun. Biasanya, motor asinkron memiliki torsi awal yang kurang dari maksimum. Hal ini dijelaskan oleh fakta bahwa dalam mode start, ketika n 2 = 0 dan S = 1, motor asinkron berada dalam mode yang mirip dengan hubung singkat pada transformator. Medan magnet rotor berlawanan arah dengan medan magnet stator.
Fluks magnet yang dihasilkan, atau utama, di celah udara mesin dalam mode start, serta ggl di stator dan rotor E 1 dan E 2, berkurang secara signifikan. Hal ini menyebabkan penurunan torsi awal mesin dan peningkatan tajam pada arus awal.
12.4. Mengatur kecepatan putaran motor asinkron.
Membalikkan motor asinkron
Dari rumus (12.2) kita peroleh
 . (12.11)
. (12.11)
Dari rumus (12.11) jelas bahwa kecepatan putaran motor asinkron dapat diubah dengan tiga cara:
1. mengubah frekuensi tegangan suplai;
2. mengubah jumlah tiang motor. Untuk melakukan ini, belitan ditempatkan di slot stator, yang dapat dialihkan ke sejumlah kutub yang berbeda;
3. penggantian slip. Metode ini dapat digunakan pada motor asinkron dengan rotor belitan. Untuk melakukan ini, rheostat penyetel disertakan dalam rangkaian rotor. Peningkatan resistansi aktif rangkaian rotor menyebabkan peningkatan slip dari S a ke S g (lihat Gambar 12.5), dan akibatnya, penurunan kecepatan mesin.
Motor asinkron punya desain sederhana dan dapat diandalkan dalam pengoperasiannya. Kerugian dari motor asinkron adalah sulitnya mengatur kecepatan putarannya.
Untuk membalikkan motor asinkron tiga fasa (mengubah arah putaran motor menjadi sebaliknya), dua fasa perlu ditukar, yaitu menukar dua kabel linier yang sesuai dengan belitan stator motor.
Tegangan U 1 yang diterapkan pada fasa belitan stator diimbangi oleh ggl utama E 1 , ggl bocor dan jatuh tegangan pada resistansi aktif belitan stator:
Pada belitan rotor, persamaan serupa akan terlihat seperti:
Namun karena belitan rotor tertutup maka tegangan U 2 =0, dan jika kita juga memperhitungkan bahwa E 2s = SE 2 dan x 2s = Sx 2, maka persamaannya dapat ditulis ulang menjadi:
![]()
Persamaan arus untuk motor asinkron mengulangi persamaan serupa untuk transformator:
28 Torsi motor asinkron
Torsi pada motor asinkron dihasilkan oleh interaksi arus rotor dengan medan magnet mesin. Torsi dapat dinyatakan secara matematis dalam bentuk daya elektromagnetik mesin:
Di mana w 1 =2pn 1 /60 - frekuensi sudut rotasi bidang. Pada gilirannya, N 1 =f 1 60/R, Kemudian
![]()
Mari kita substitusikan ke dalam rumus M 1 ekspresi REm=Pe2/S dan membaginya dengan 9,81, kita mendapatkan:
![]()
Persamaan Torsi Motor Induksi
Oleh karena itu torsi motor sebanding dengan rugi-rugi listrik pada rotor. Mari kita substitusikan nilai saat ini ke dalam rumus terakhir SAYA 2 ’ :
kita memperoleh persamaan torsi motor asinkron:
Di mana kamu 1 - tegangan fasa belitan stator.
29 .Karakteristik mekanis mesin disebut ketergantungan kecepatan rotor terhadap torsi pada poros n = f (M2). Karena torsi tanpa beban kecil di bawah beban, M2 ≈ M dan karakteristik mekanis diwakili oleh ketergantungan n = f (M). Jika kita memperhitungkan hubungan s = (n1 - n) / n1, maka karakteristik mekanik dapat diperoleh dengan merepresentasikan ketergantungan grafisnya pada koordinat n dan M (Gbr. 1).
Beras. 1. Karakteristik mekanis motor asinkron
Karakteristik mekanik alami motor induksi sesuai dengan sirkuit utama (sertifikat) koneksinya dan parameter nominal tegangan suplai. Karakteristik buatan diperoleh jika ada elemen tambahan yang disertakan: resistor, reaktor, kapasitor. Ketika motor ditenagai dengan tegangan non-rata, karakteristiknya juga berbeda dari karakteristik mekanis alami.
Karakteristik mekanis adalah alat yang sangat mudah dan berguna untuk menganalisis mode statis dan dinamis dari penggerak listrik.
30 Karakteristik mekanis dan pengaturan mandiri mesin. Grafik yang menghubungkan besaran mekanik - kecepatan dan torsi - disebut karakteristik mekanik motor asinkron (Gbr. 7) n = ƒ(M). Pengaturan mandiri motor asinkron adalah sebagai berikut. Biarkan mesin beroperasi secara stabil dalam mode tertentu, mengembangkan kecepatan n1 dan torsi M1. Dengan putaran seragam, torsi ini sama dengan torsi pengereman M t1, yaitu. M1=M T 1, n1= aset. Peningkatan torsi pengereman hingga M2 akan menyebabkan penurunan kecepatan alat berat, karena torsi pengereman akan menjadi lebih besar dibandingkan torsi. Ketika kecepatan menurun, slip meningkat, yang pada gilirannya menyebabkan peningkatan ggl dan arus pada rotor. Hal ini meningkatkan torsi mesin. Proses ini berakhir ketika torsi M2 yang dikembangkan mesin menjadi sama dengan M T 2. Dalam hal ini, kecepatan putaran diatur lebih rendah dari n1. Sifat yang secara otomatis menciptakan keseimbangan antara pengereman dan torsi disebut regulasi diri.
Di bangku laboratorium, mesin diisi dengan rem listrik, yang terdiri dari elektromagnet, di celahnya piringan yang dipasang pada poros mesin berputar. Dengan mengubah tegangan suplai kumparan elektromagnet dengan pegangan autotransformator, gaya pengereman dapat diubah, momennya sama dengan: M BRAKE = F r (N m)
dimana F adalah gaya (gaya) yang bekerja pada keliling katrol, (N);
r adalah jari-jari katrol sama dengan 0,18 m Daya bersih pada poros motor:
Di mana N- kecepatan putaran mesin, rpm.
di mana ƒ adalah frekuensi jaringan (sama dengan 50 Hz),
R- jumlah pasang kutub belitan stator (sama dengan 2).
n 1 - kecepatan sinkron dari medan magnet yang berputar.
Kecepatan putaran mesin ditentukan dengan menggunakan tachometer. Slip dihitung menggunakan rumus:
31 Karakteristik kinerja disebut ketergantungan daya yang dikonsumsi oleh mesin, konsumsi arus I, faktor daya, kecepatan putaran mesin, efisiensi dan torsi M pada daya berguna mesin yang disalurkan ke poros. Karakteristik kinerja menentukan sifat operasional dasar motor asinkron. Karakteristik kinerja motor asinkron daya sedang ditunjukkan pada Gambar. 8.8. Perilaku mereka dijelaskan sebagai berikut. Pada beban ringan, arus yang dikonsumsi oleh motor I (arus tanpa beban) dapat berkisar antara 20 hingga 70% dari arus pengenal. Ketika beban meningkat, arus dalam rangkaian rotor meningkat, yang menyebabkan peningkatan arus yang hampir sebanding SAYA pada rangkaian stator.
Gambar.8.8 Torsi motor () juga hampir sebanding dengan beban, namun pada beban tinggi linearitas grafiknya agak terganggu akibat penurunan kecepatan putaran mesin. Karakteristik kinerja menyatakan hubungan antara daya yang dikembangkan oleh motor dan pergeseran fasa antara arus dan tegangan stator. Motor asinkron, seperti transformator, mengkonsumsi arus I dari jaringan, yang jauh berbeda fasa dengan tegangan yang diberikan. Misalnya saja dalam mode siaga. Dengan bertambahnya beban pada poros motor, arus komponen aktif rotor dan stator semakin meningkat . Nilai maksimum dicapai pada .
Dengan peningkatan lebih lanjut, nilainya akan sedikit menurun. Hal ini dijelaskan oleh peningkatan slip s, yang menyebabkan peningkatan reaktansi belitan rotor, dan akibatnya, pergeseran fasa. . DENGAN meningkat dan, yaitu. akan berkurang.
Perilaku karakteristik operasi dijelaskan sebagai berikut. Nilai efisiensi ditentukan oleh rasio daya berguna terhadap daya yang dikonsumsi dari jaringan.
Besarannya disebut rugi-rugi daya. Selain rugi-rugi pada stator dan rotor baja akibat pembalikan magnetisasi dan arus eddy, yang bersama-sama dengan rugi-rugi mekanis dapat dianggap konstan, pada motor asinkron juga terdapat rugi-rugi tembaga. ,
itu. pada belitan stator dan rotor, yang sebanding dengan kuadrat arus yang mengalir dan, oleh karena itu, bergantung pada beban. Selama operasi tanpa beban, seperti pada transformator, rugi-rugi pada baja mendominasi, karena a sama dengan arus tanpa beban, yang kecil. Pada beban kecil pada poros, kerugian tembaga masih tetap kecil, dan oleh karena itu efisiensinya ditentukan oleh rumus ![]() (8.5)
(8.5)
dengan peningkatan, pertama-tama meningkat tajam. Ketika rugi-rugi konstan menjadi sama dengan rugi-rugi yang bergantung pada beban , efisiensi mencapai nilai maksimalnya. Dengan peningkatan beban lebih lanjut, kehilangan daya variabel meningkat secara signifikan, sehingga menghasilkan efisiensi. berkurang secara nyata. Sifat kecanduan ) dapat dijelaskan dari hubungannya . Jika efisiensi adalah konstan, maka akan ada hubungan linier antara dan. Tapi karena efisiensinya bergantung pada dan ketergantungan ini pada awalnya meningkat tajam, dan dengan peningkatan beban lebih lanjut, perubahannya tidak signifikan, kemudian kurva ) Mula-mula pertumbuhannya lambat dan kemudian meningkat tajam.
32 Dalam suatu rangkaian listrik, jumlah daya semua sumber energi listrik harus sama dengan jumlah daya semua penerima dan elemen bantu. Setelah memperoleh persamaan daya sebelumnya, kita dapat menulis dalam bentuk umum persamaan keseimbangan daya untuk setiap rangkaian listrik:
Σ E → SAYA → + Σ kamu ← SAYA → = Σ E ← SAYA → + Σ kamu → SAYA → + Σ SAYA 2 R.
Persamaan (1.35) dapat ditulis baik untuk arah ggl, tegangan, dan arus sebenarnya, dan untuk kasus ketika beberapa di antaranya dipilih secara sewenang-wenang dalam arah positif. Dalam kasus pertama, semua suku di dalamnya akan positif dan elemen rangkaian yang bersangkutan sebenarnya akan menjadi sumber atau penerima energi listrik. Jika beberapa istilah ditulis dengan mempertimbangkan arah positif yang dipilih secara sewenang-wenang, elemen-elemen yang terkait harus dianggap sebagai sumber dan penerima yang diduga. Sebagai hasil perhitungan atau analisis, beberapa di antaranya mungkin berubah menjadi negatif. Ini berarti bahwa beberapa sumber yang dianggap sebenarnya adalah penerima, dan beberapa penerima yang dianggap sebenarnya adalah sumber.
33 Memulai motor asinkron disertai dengan proses transien mesin yang berhubungan dengan peralihan rotor dari keadaan diam ke keadaan putaran seragam, dimana torsi mesin menyeimbangkan momen gaya hambatan pada poros mesin. Saat menghidupkan motor asinkron, terjadi peningkatan konsumsi energi listrik dari jaringan suplai, yang dihabiskan tidak hanya untuk mengatasi torsi pengereman yang diterapkan pada poros dan menutupi kerugian pada motor asinkron itu sendiri, tetapi juga untuk memberikan energi kinetik tertentu. ke bagian bergerak dari unit produksi. Oleh karena itu, saat start, motor asinkron harus mengembangkan torsi yang meningkat. Untuk motor asinkron dengan rotor belitan torsi awal awal yang sesuai dengan slip sp = 1 bergantung pada resistansi aktif dari resistor yang dapat disesuaikan yang dimasukkan ke dalam rangkaian rotor.
Beras. 1. Menghidupkan motor asinkron tiga fasa dengan rotor belitan: a - grafik ketergantungan torsi motor dengan rotor belitan terhadap slip pada berbagai resistansi aktif resistor pada rangkaian rotor, b - diagram pengaktifan resistor dan menutup kontak percepatan pada rangkaian rotor. Jadi, dengan kontak percepatan tertutup U1, U2, yaitu pada saat menstart motor asinkron dengan slip ring hubung singkat, torsi awal awal Mn1 = (0,5 -1,0) Mnom, dan arus awal awal Iп = (4,5 - 7) Inom dan banyak lagi. Torsi awal awal yang kecil dari motor listrik asinkron dengan rotor belitan mungkin tidak cukup untuk menggerakkan unit produksi dan percepatan selanjutnya, dan arus awal yang signifikan akan menyebabkan peningkatan pemanasan belitan motor, yang membatasi frekuensi penyalaannya, dan dalam jaringan berdaya rendah menyebabkan pengoperasian penerima lain yang tidak diinginkan, penurunan tegangan sementara. Keadaan ini mungkin menjadi alasan yang menghalangi penggunaan motor asinkron dengan rotor belitan dengan arus awal yang besar untuk menggerakkan mekanisme operasi. Pengenalan resistor yang dapat disesuaikan, yang disebut resistor awal, ke dalam rangkaian rotor motor tidak hanya mengurangi arus awal awal, tetapi pada saat yang sama meningkatkan torsi awal awal, yang dapat mencapai torsi maksimum Mmax (Gbr. 1, a, kurva 3 ), jika slip kritis motor rotor belitan adalah skr = (R2" + Rd") / (X1 + X2") = 1, dimana Rd" adalah resistansi aktif resistor yang terletak pada fasa rotor motor belitan, direduksi menjadi fase belitan stator. Peningkatan lebih lanjut dalam resistansi aktif resistor awal tidak praktis, karena hal ini menyebabkan melemahnya torsi awal awal dan titik torsi maksimum memasuki daerah geser s > 1, yang menghilangkan kemungkinan percepatan rotor. Resistansi aktif resistor yang diperlukan untuk menstart motor rotor belitan ditentukan berdasarkan persyaratan start, yaitu mudah jika Mn = (0,1 - 0,4) Mnom, normal jika Mn - (0,5 - 0,75) Mn, dan berat jika Mn ≥ Mn. Untuk mempertahankan torsi yang cukup besar oleh motor rotor belitan selama akselerasi unit produksi guna mempersingkat durasi proses transien dan mengurangi pemanasan mesin, perlu dilakukan penurunan resistansi aktif resistor start secara bertahap. Perubahan torsi yang diijinkan selama akselerasi M(t) ditentukan oleh kondisi kelistrikan dan mekanik yang membatasi batas torsi puncak M > 0,85 Mmaks, momen peralihan M2 > > Ms (Gbr. 2), serta akselerasi.
Beras. 2. Karakteristik pengasutan motor asinkron tiga fasa dengan rotor belitan. Peralihan resistor start dilakukan dengan menyalakan secara bergantian kontaktor percepatan Y1, Y2, masing-masing, pada waktu t1, t2 dihitung sejak mesin dihidupkan, ketika selama akselerasi torsi M menjadi sama dengan momen peralihan M2. Berkat ini, sepanjang start-up, semua momen puncak adalah sama dan semua momen peralihan sama satu sama lain. Karena torsi dan arus motor asinkron dengan rotor belitan saling berhubungan, maka ketika mempercepat rotor, dimungkinkan untuk mengatur batas arus puncak I1 = (1,5 - 2,5) Inom dan arus switching I2, yang harus memastikan momen peralihan M2 > Mc. Pemutusan motor asinkron dengan rotor belitan dari jaringan suplai selalu dilakukan dengan rangkaian rotor dihubung pendek, untuk menghindari terjadinya tegangan lebih pada fasa-fasa belitan stator, yang dapat melebihi tegangan pengenal fasa-fasa tersebut sebesar 3 - 4 kali jika rangkaian rotor terbuka pada saat mesin dimatikan.
34 Regulasi frekuensi. Metode kontrol kecepatan ini memungkinkan penggunaan motor asinkron yang paling andal dan termurah dengan rotor sangkar tupai. Namun untuk mengubah frekuensi tegangan suplai diperlukan sumber arus listrik dengan frekuensi yang bervariasi. Sebagai yang terakhir, digunakan generator sinkron dengan kecepatan variabel, atau konverter frekuensi - mesin listrik atau statis, dibuat pada katup semikonduktor yang dikontrol (thyristor). Saat ini konverter frekuensi memiliki rangkaian yang agak rumit dan biaya yang relatif mahal. Namun, pesatnya perkembangan teknologi semikonduktor daya memberikan harapan untuk peningkatan lebih lanjut pada konverter frekuensi, yang membuka prospek meluasnya penggunaan pengaturan frekuensi. Penjelasan rinci tentang hukum kontrol pengaturan frekuensi dan analisis pengoperasian motor asinkron ketika ditenagai oleh konverter frekuensi diberikan dalam § 4.13 dan 4.14. Regulasi dengan mengubah jumlah tiang. Peraturan ini memungkinkan Anda memperoleh perubahan bertahap dalam kecepatan putaran. Pada Gambar. Gambar 4.35 menunjukkan rangkaian paling sederhana (untuk satu fase), yang memungkinkan Anda menggandakan jumlah kutub belitan stator. Untuk melakukan ini, setiap fase belitan stator dibagi menjadi dua bagian, yang dialihkan dari sambungan seri ke sambungan paralel. Dari gambar tersebut jelas bahwa ketika kumparan 1-2 dan 3-4 dihubungkan menjadi dua cabang paralel, jumlah kutub menjadi setengahnya, sehingga frekuensi putaran medan magnet menjadi dua kali lipat. Saat berpindah, jumlah belitan yang dihubungkan secara seri di setiap fasa menjadi setengahnya, tetapi karena kecepatan putarannya berlipat ganda, ggl yang diinduksi dalam fasa tetap tidak berubah. Akibatnya, motor dapat dihubungkan ke jaringan dengan tegangan yang sama pada kedua kecepatan. Untuk menghindari peralihan pada belitan rotor, yang terakhir dilakukan hubung singkat. Jika Anda perlu memiliki tiga atau empat frekuensi putaran, maka belitan lain ditempatkan pada stator, ketika dialihkan, Anda bisa mendapatkan dua frekuensi tambahan. Motor asinkron dengan perpindahan jumlah kutub disebut multi-kecepatan. Regulasi dengan memasukkan rheostat pada rangkaian rotor. Ketika resistansi aktif tambahan dihubungkan ke rangkaian rotor R ext1, R ext2, R ext3 dan lain-lain bentuk ketergantungan berubah M = f(s) dan karakteristik mekanis N 2 = f(M) mesin (Gbr. 4.37, a). Pada saat yang sama, momen beban tertentu M n slip pertandingan S 1 , S 2 , S 3 , ..., lebih besar dari tergelincir S e , ketika mesin beroperasi pada karakteristik alami (dengan R ekst = 0). Akibatnya, kecepatan mesin pada kondisi tunak menurun N e sebelum P 1 P 2 , P 3 ,... (Gbr. 4.37, b). Metode pengendalian ini hanya dapat digunakan untuk motor rotor belitan. Ini memungkinkan Anda mengubah kecepatan putaran dengan lancar dalam rentang yang luas. Kerugiannya adalah: a) kehilangan energi yang besar pada rheostat kontrol; b) karakteristik mekanis mesin yang terlalu “lunak” dengan resistansi tinggi pada rangkaian rotor. Dalam beberapa kasus, hal terakhir ini tidak dapat diterima, karena perubahan kecil pada torsi beban berhubungan dengan perubahan signifikan pada kecepatan putaran.
35 Generator asinkron adalah mesin listrik asinkron (motor listrik) yang beroperasi dalam mode generator. Dengan bantuan motor penggerak (dalam kasus kami, mesin turbin), rotor generator listrik asinkron berputar searah dengan medan magnet. Dalam hal ini, slip rotor menjadi negatif, torsi pengereman muncul pada poros mesin asinkron, dan generator mentransfer energi ke jaringan. Untuk membangkitkan gaya gerak listrik pada rangkaian keluarannya, digunakan magnetisasi sisa rotor. Kapasitor digunakan untuk ini. Generator asinkron tidak rentan terhadap korsleting. Generator asinkron dirancang lebih sederhana daripada generator sinkron (misalnya, generator mobil): jika generator asinkron memiliki kumparan induktansi yang ditempatkan pada rotornya, maka rotor generator asinkron mirip dengan roda gila biasa. Generator seperti itu lebih terlindungi dari kotoran dan kelembapan, lebih tahan terhadap korsleting dan beban berlebih, dan tegangan keluaran generator listrik asinkron memiliki tingkat distorsi nonlinier yang lebih rendah. Hal ini memungkinkan penggunaan generator asinkron tidak hanya untuk memberi daya pada perangkat industri yang tidak penting bagi bentuk tegangan input, tetapi juga untuk menghubungkan peralatan elektronik. Ini adalah generator listrik asinkron yang merupakan sumber arus ideal untuk perangkat dengan beban aktif (ohmik): pemanas listrik, konverter las, lampu pijar, perangkat elektronik, peralatan komputer dan radio. Keuntungan dari generator asinkron . Keuntungan tersebut termasuk faktor kliring yang rendah (faktor harmonik), yang mencirikan adanya kuantitatif harmonik yang lebih tinggi pada tegangan keluaran generator. Harmonisa yang lebih tinggi menyebabkan putaran yang tidak merata dan pemanasan motor listrik yang tidak perlu. Generator sinkron dapat memiliki faktor kliring hingga 15%, dan faktor kliring generator listrik asinkron tidak melebihi 2%. Jadi, generator listrik asinkron hampir hanya menghasilkan energi yang berguna. Keuntungan lain dari generator listrik asinkron adalah tidak adanya belitan berputar dan komponen elektronik yang sensitif terhadap pengaruh luar dan seringkali rentan terhadap kerusakan. Oleh karena itu, generator asinkron hanya mengalami sedikit keausan dan dapat berfungsi untuk waktu yang sangat lama. Output dari generator kami langsung 220/380V AC, yang dapat digunakan langsung ke peralatan rumah tangga (misalnya pemanas), untuk mengisi baterai, untuk dihubungkan ke penggergajian kayu, dan juga untuk pengoperasian paralel dengan jaringan tradisional. Dalam hal ini, Anda akan membayar selisih antara apa yang dikonsumsi dari jaringan dan apa yang dihasilkan oleh kincir angin. Karena tegangan langsung menuju parameter industri, maka Anda tidak memerlukan berbagai konverter (inverter) saat menghubungkan generator angin langsung ke beban Anda. Misalnya, Anda dapat langsung menyambung ke pabrik penggergajian kayu dan, jika ada angin, bekerja seolah-olah Anda baru saja tersambung ke jaringan 380V. Seperti diketahui, untuk mengurangi waktu pengereman saat menghentikan mesin dan mekanisme produksi, sering digunakan rem mekanis. Mengurangi waktu pengereman, terutama dalam kasus siklus pengoperasian yang pendek, menghasilkan peningkatan yang signifikan pada produktivitas alat berat dan mekanisme. Kerugian dari rem mekanis adalah cepatnya keausan permukaan gesekan, kerumitan dan kebutuhan penyesuaian gaya pengereman secara berkala, serta kebutuhan ruang tambahan untuk menampung rem dan sambungannya ke mekanisme. Semua kerugian di atas dihilangkan jika, untuk tujuan ini, alih-alih rem mekanis, sifat motor listrik digunakan untuk beroperasi dalam mode pengereman, yaitu, pada dasarnya bekerja sebagai generator dan tidak mengembangkan putaran, tetapi torsi pengereman. Di banyak mesin pengangkat dan pengangkut (derek, elevator, eskalator, dll.), di mana pergerakan di bawah pengaruh gravitasi dimungkinkan, kecepatan penurunan beban yang konstan dan stabil dipastikan dengan menggunakan torsi pengereman motor listrik. Motor DC dapat beroperasi dalam tiga mode pengereman:
Dalam mode anti-saklar;
Dalam mode generator dengan keluaran energi ke jaringan;
Dalam mode pengereman dinamis.
Dalam mode pengereman mana pun, motor listrik beroperasi sebagai generator, mengubah, misalnya, energi kinetik bagian yang bergerak atau energi potensial dari penurunan beban menjadi energi listrik.
36 Saat memundurkan mesin sambil bergerak dengan mengganti saklar, mesin pertama-tama diperlambat dari kecepatan tertentu ke nol, dan kemudian dipercepat ke arah lain. Pengereman seperti itu juga dapat digunakan untuk pengereman selama apa yang disebut anti-inklusi. Dengan pembalikan atau pengereman seperti itu, arus yang signifikan terjadi pada motor asinkron dengan rotor sangkar-tupai. Oleh karena itu, berdasarkan kondisi pemanasan mesin tersebut, jumlah putaran per jam tidak lebih dari puluhan. Untuk membatasi arus dan meningkatkan torsi, resistansi dimasukkan ke dalam rangkaian rotor fase motor asinkron. Mari kita pertimbangkan tiga metode utama pengereman listrik motor asinkron. Pengereman dengan metode counter-switching, seperti yang disebutkan, ini dihasilkan saat mesin dihidupkan saat bepergian. Dalam hal ini, medan magnet berputar ke arah yang berlawanan dengan arah putaran mesin, dan torsi mesin yang direm berlawanan dengan arah putaran. Pengereman genset terjadi ketika mesin multi-kecepatan dialihkan dari kecepatan yang lebih tinggi ke kecepatan yang lebih rendah, mis. ketika mengganti mesin dari jumlah kutub yang lebih kecil ke kutub yang lebih besar. Pada saat peralihan pertama, kecepatan mesin ternyata jauh lebih besar daripada kecepatan medannya, yaitu slip menjadi negatif dan mesin beralih beroperasi sebagai generator. Pengereman terjadi ketika energi kinetik dari bagian-bagian yang berputar diubah menjadi energi listrik, yang, dikurangi kerugian pada mesin, disalurkan ke jaringan. Pengereman generator juga dapat digunakan pada pengangkatan saat menurunkan beban berat, mempercepat mesin hingga kecepatan melebihi kecepatan sinkron; kemudian mesin mulai melepaskan ke dalam jaringan energi yang diberikan kepadanya oleh beban yang menurun. Pengereman dalam mode pengoperasian generator hanya dapat dilakukan pada kecepatan supersinkron. Jika mesin harus dimatikan pada akhir pengereman, maka pada akhir pengereman sebaiknya beralih ke pengereman mekanis atau jenis pengereman elektrik lainnya (dinamis, back-on). Jika perlu, posisi di ujung hanya bisa diamankan menggunakan rem mekanis. Pada pengereman dinamis Belitan stator motor diputuskan dari jaringan tiga fasa dan dihubungkan ke jaringan arus bolak-balik satu fasa atau DC. Dalam hal ini, berbagai cara untuk menghubungkan fase belitan stator dimungkinkan. Belitan stator, ditenagai oleh arus searah, menciptakan medan magnet stasioner. Sama seperti saat mesin beroperasi normal, medan putarnya menyeret rotor bersamanya, medan stasioner saat pengereman dinamis menyebabkan rotor berhenti dengan cepat. Energi kinetik dari bagian yang berputar diubah menjadi panas, dilepaskan dalam rangkaian rotor karena arus yang diinduksi di dalamnya oleh medan stator stasioner. Pengereman yang mulus dipastikan dengan mengatur tegangan pada terminal stator.Torsi pengereman motor dengan rotor belitan juga dapat diatur oleh rheostat pada rangkaian rotor. Kerugian dari pengereman dinamis adalah memerlukan sumber DC tegangan rendah.
37 Mesin sinkron adalah mesin listrik arus bolak-balik yang kecepatan rotornya sama dengan kecepatan putaran medan magnet di celah udara. Bagian utama mesin sinkron adalah jangkar dan induktor. Desain yang paling umum adalah desain di mana jangkar terletak di stator, dan induktor terletak di rotor yang dipisahkan oleh celah udara. Angker terdiri dari satu atau lebih belitan arus bolak-balik. Pada motor, arus yang disuntikkan ke jangkar menciptakan medan magnet berputar, yang menyatu dengan medan induktor dan dengan demikian terjadi konversi energi. Medan jangkar mempengaruhi medan induktor dan oleh karena itu disebut juga medan reaksi jangkar. Pada generator, medan reaksi jangkar dihasilkan oleh arus bolak-balik yang diinduksikan pada belitan jangkar dari induktor. Induktor terdiri dari kutub - elektromagnet arus searah atau magnet permanen (dalam mesin mikro). Induktor mesin sinkron memiliki dua desain berbeda: kutub menonjol atau kutub tidak menonjol. Mesin kutub menonjol dibedakan oleh fakta bahwa kutub-kutubnya diucapkan dan memiliki desain yang mirip dengan kutub-kutub mesin DC. Dengan desain kutub tidak menonjol, belitan eksitasi ditempatkan pada alur inti induktor, sangat mirip dengan belitan rotor mesin asinkron dengan rotor belitan, yang membedakan hanyalah terdapat ruang antar kutub. dibiarkan tidak terisi dengan konduktor (yang disebut gigi besar). Desain tiang tidak menonjol digunakan pada mesin berkecepatan tinggi untuk mengurangi beban mekanis pada tiang. Untuk mengurangi hambatan magnet, yaitu untuk meningkatkan aliran fluks magnet, digunakan inti feromagnetik dari rotor dan stator. Pada dasarnya, mereka adalah struktur laminasi yang terbuat dari baja listrik (yaitu, dirakit dari lembaran terpisah). Baja listrik memiliki sejumlah sifat menarik. Antara lain memiliki kandungan silikon yang tinggi untuk meningkatkan hambatan listrik sehingga mengurangi arus eddy.
 (1 peringkat, rata-rata: 5,00 dari 5)
(1 peringkat, rata-rata: 5,00 dari 5) 

